
ガイドブック
アプリケーション例
例 1:履歴/シミュレーションデータソースに基づくリプレイシミュレーション
シナリオ概要
ある生産ライン設備で運転データが蓄積されており、ユーザーは DFS を用いてリプレイし、設備とラインの協調効果を検証したいと考えています。
また、実データが不足している場合、シミュレーションデータファイルを用いてシミュレーションを駆動し、テストを行うことも可能です。
本例では、シミュレーションデータソースを使ってロボットアームを駆動する方法を紹介します。
ステップ 1. デジタルツインシーンの構築
- モデルの準備:
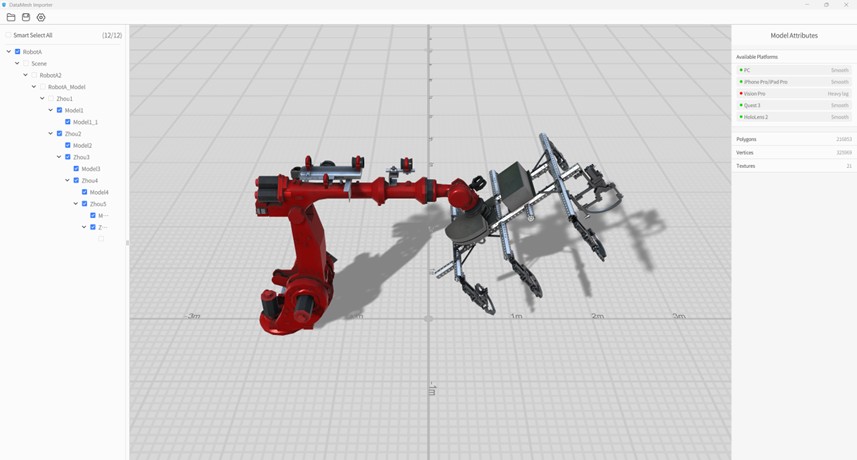
a) DataMesh Importer でモデルを開きます。
b) 実際の動作要件に基づき、データ駆動に使用するモデル階層内のノードを選択します。
c) モデルを FactVerse リソースライブラリにアップロードします。
- テンプレートの作成と設定:
a) FactVerse Designer で新しいテンプレートを作成します。
b) ロボットアームモデルを配置し、構造「各軸の回転角度」およびその回転属性(vector3)を追加します。
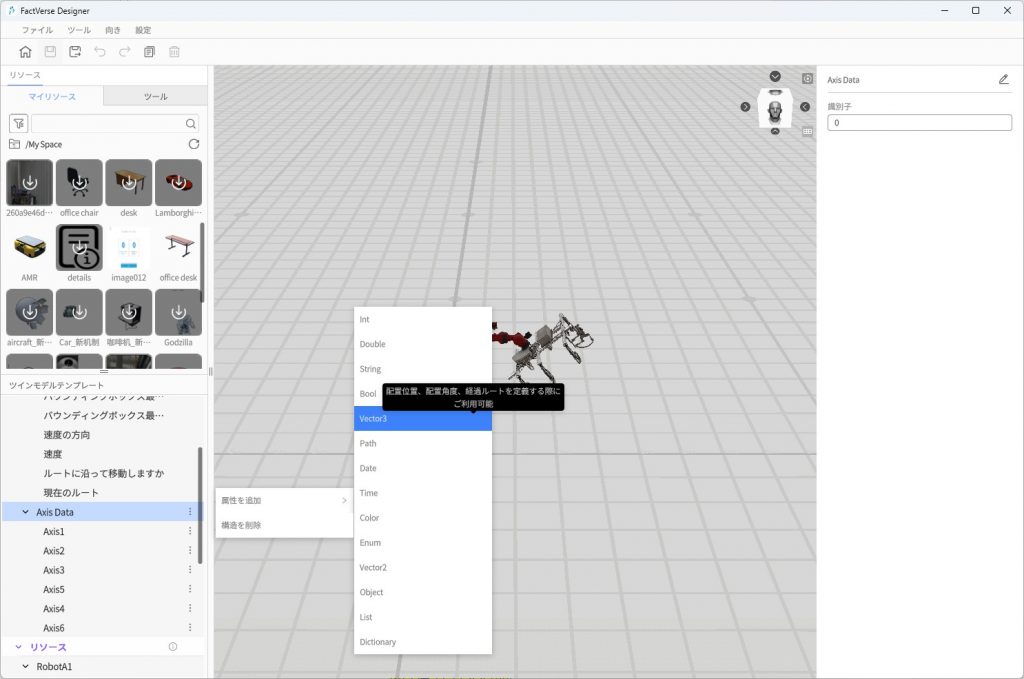
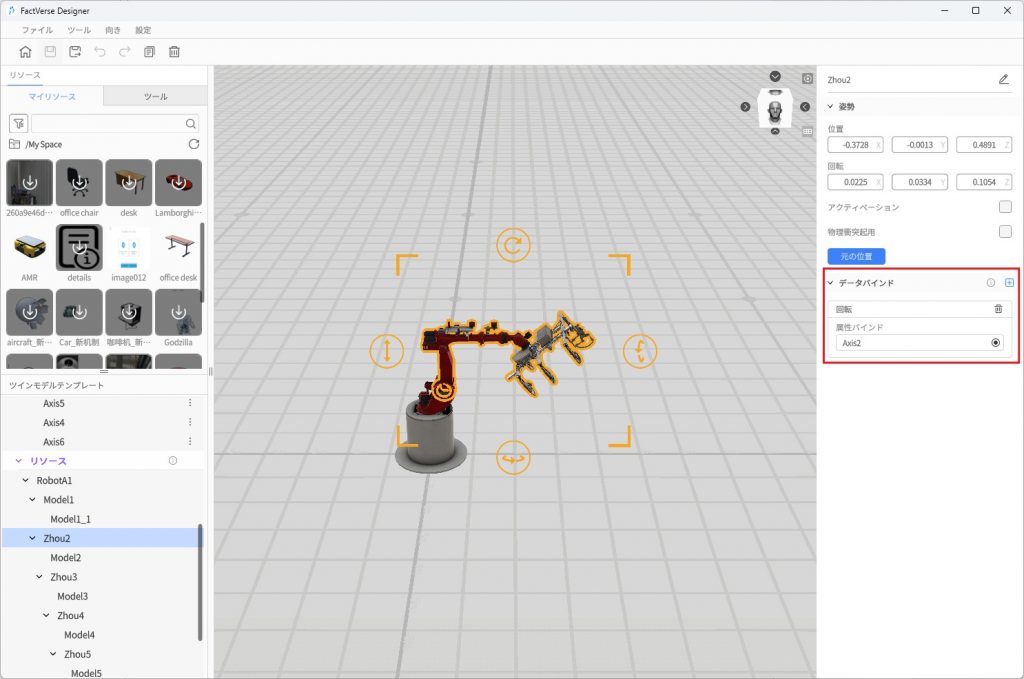
c) データバインディングエリアで、モデル階層と各軸の回転属性を関連付け、完了後にテンプレートを保存します。
- ツインシーンの構築:
a) 新しいツインシーンを作成し、作成済みのロボットアームテンプレートを基にツインモデル「ロボットアームA1」を生成します。
b) ツインモデルの位置とレイアウトを調整し、基礎的なシーン構築を完了して保存します。
ステップ 2. シミュレーションタスクの作成
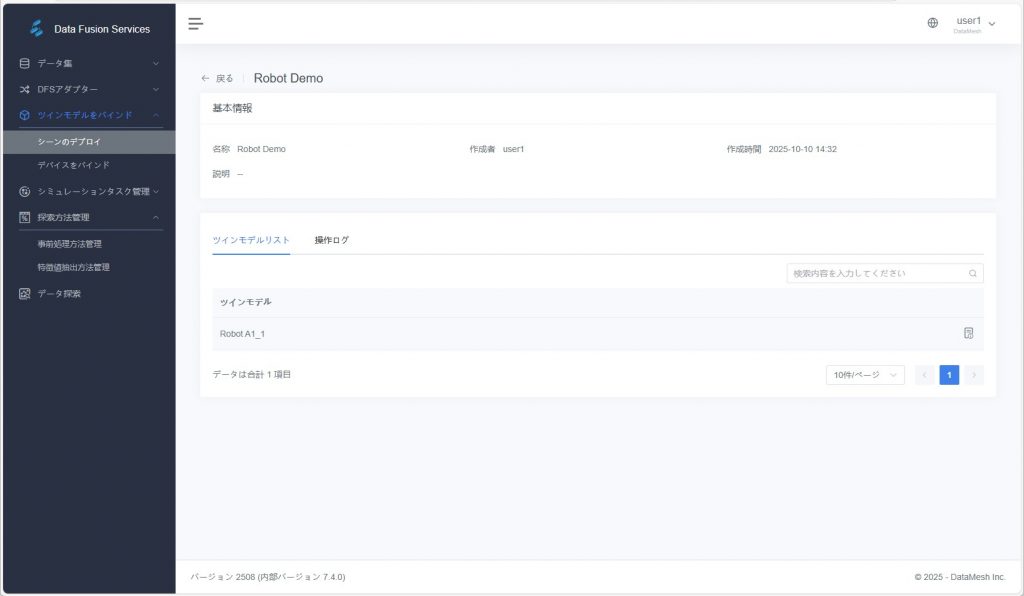
- ツインシーンのインポート:DFSプラットフォームで【ツインモデル関連】>【シーン設定】ページに入り、【インポート】をクリックし、インポートしたいツインシーンを選択します。
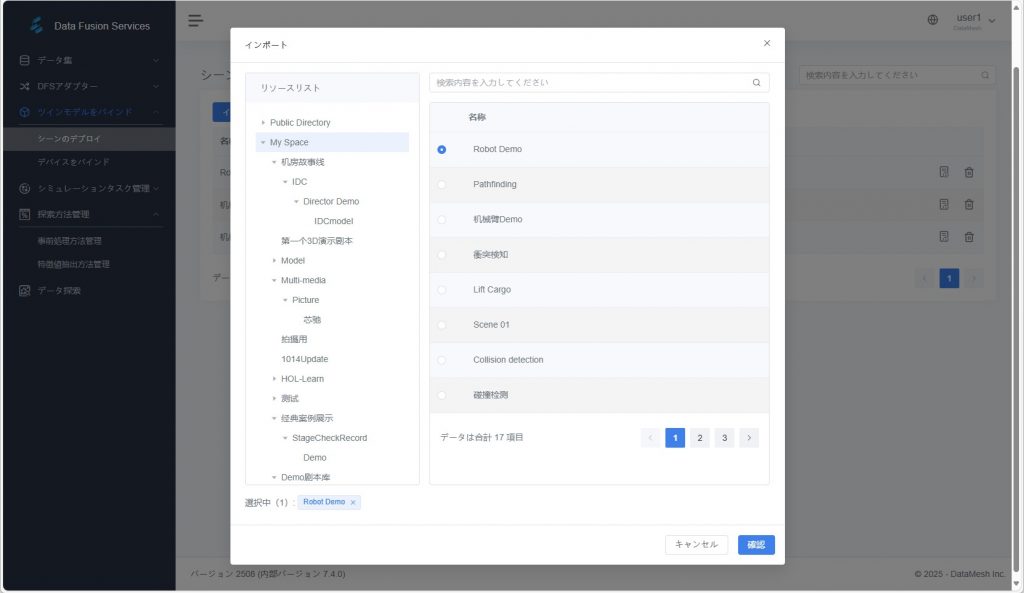
インポートが完了すると、シーン詳細ページでツインモデルの一覧を確認できます。
- デバイス情報のインポート
デバイス情報は、以下のいずれかの方法でインポートできます:
a)【アダプタインスタンス】 ページでアダプタインスタンスを設定し、デバイスデータを送信することで、システムが自動的にデバイス情報を生成します
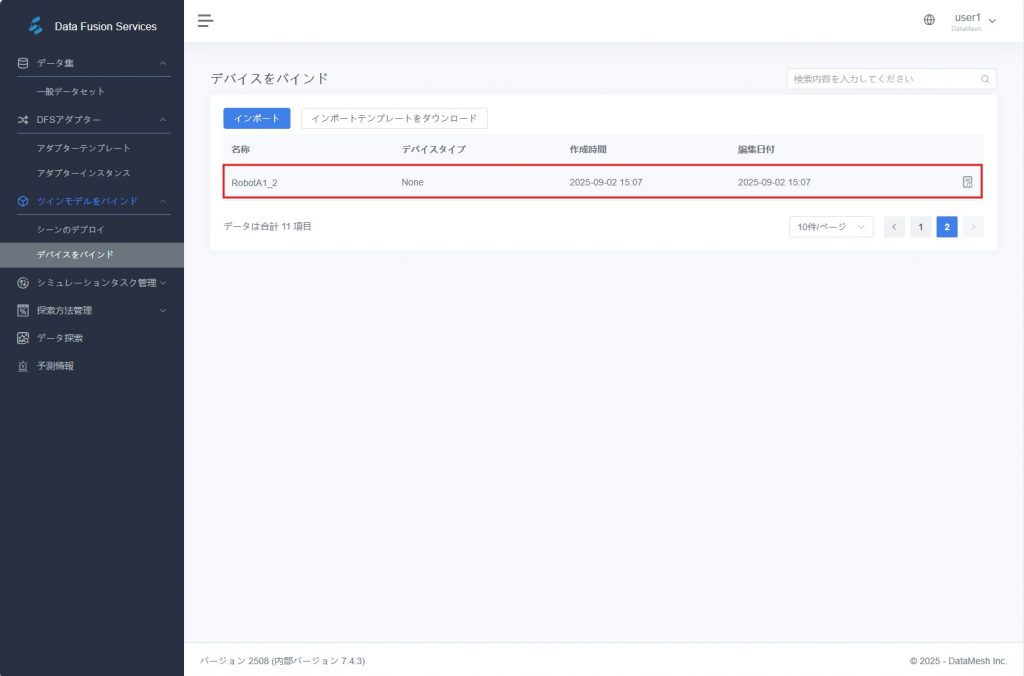
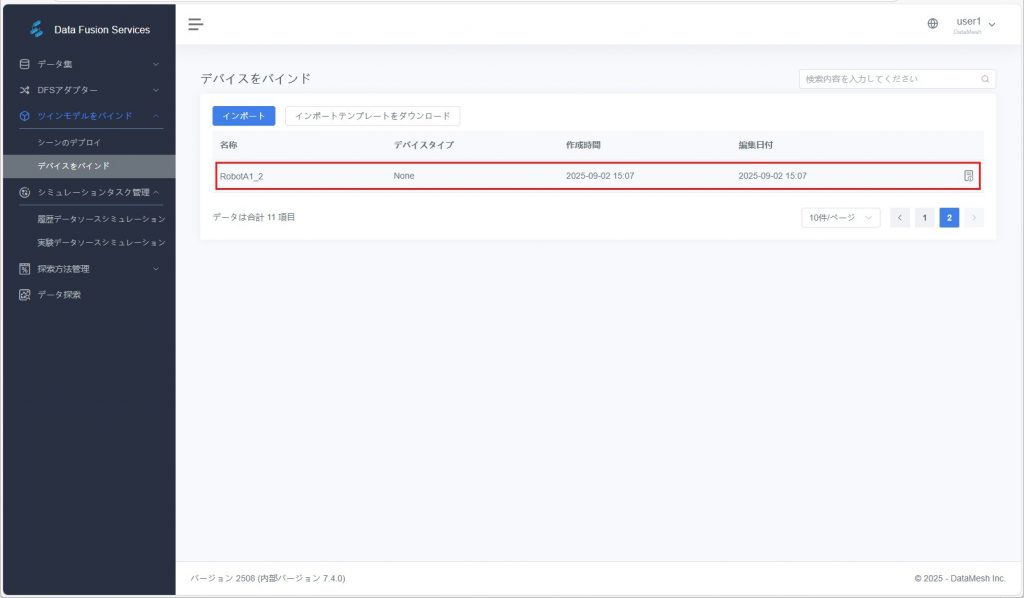
b)【ツインモデル関連付け】>【デバイスバインド】 ページで、【インポート】をクリックし、シミュレーションデータファイルを用いてデバイス情報を取り込みます
インポートが完了すると、対象デバイスが一覧に表示されます。
例:後続のシミュレーションタスクで使用するデバイス名「RobotA1_2」が生成されます。
- 新規シミュレーションデータソースタスクの作成:
a)【シミュレーションタスク管理】>【シミュレーションデータソース】に入り、新規タスクを作成してデータをアップロードします。
b) データを対応するデバイスにバインドし、データのループ間隔時間を設定します。

サンプルデータファイル(example.xlsx)
| デバイス名(name) | デバイス属性(key) | デバイス属性値(value) | データ生成タイムスタンプ |
| RobotA1_2 | A1Pos | 270,72.68018,0 | |
| RobotA1_2 | A2Pos | 356.0886,330.6853,6.112504 | |
| RobotA1_2 | A3Pos | 358.6275,297.3004,359.3982 | |
| RobotA1_2 | A4Pos | 0.8182315,352.0203,268.8459 | |
| RobotA1_2 | A5Pos | 73.55777,344.6217,255.9178 | |
| RobotA1_2 | A6Pos | 8.447219,89.98469,1.294706E-06 |
- データをツインモデルにバインド
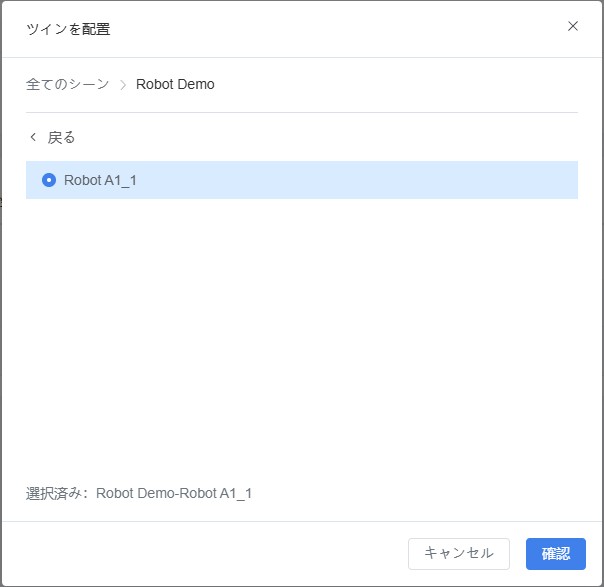
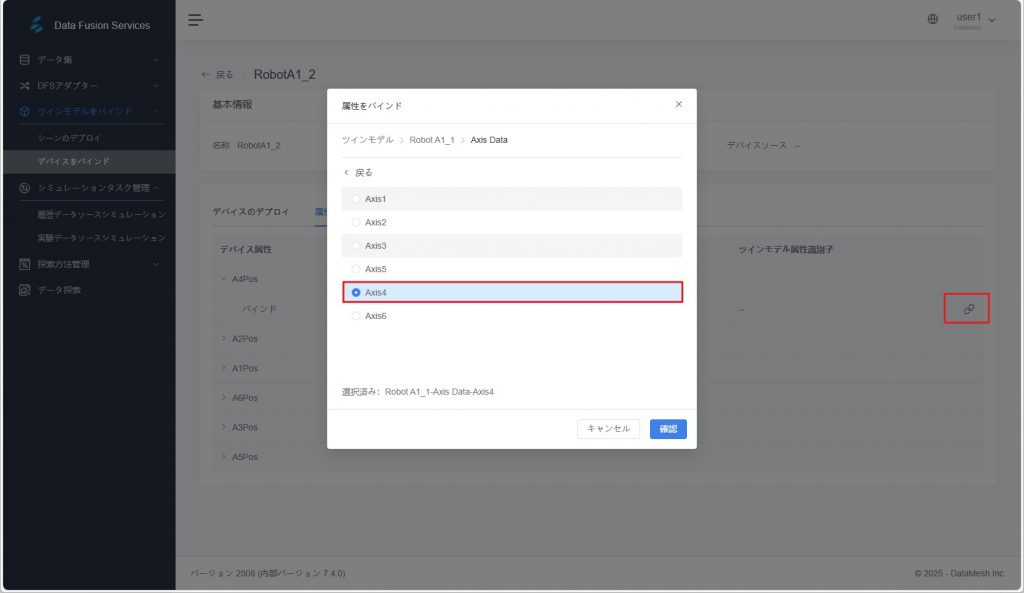
a) 【ツインモデル関連】>【デバイスバインド】ページに入り、バインドしたいデバイスを選択して詳細ページに入ります。
b) デバイス設定欄で【ツインモデルを設定】をクリックし、ポップアップで対応するツインモデルを選択します。
c) 欄でバインドアイコン![]() をクリックし、デバイス属性とツインモデル属性を一つずつバインドします
をクリックし、デバイス属性とツインモデル属性を一つずつバインドします
ステップ 3. シーン検証
- FactVerse Designer に戻り、データがバインドされたツインシーンを開きます。
- 【デバッグ再生】をクリックし、ロボットアーム各関節がシミュレーションデータによって駆動される動きを確認します。
例 2:Designer シミュレーション記録分析
シナリオ概要
Designer で複数のシミュレーションを実行し、異なるパラメータ下での生産効率を比較します。その結果を自動で可視化ダッシュボードに生成し、意思決定分析に活用します。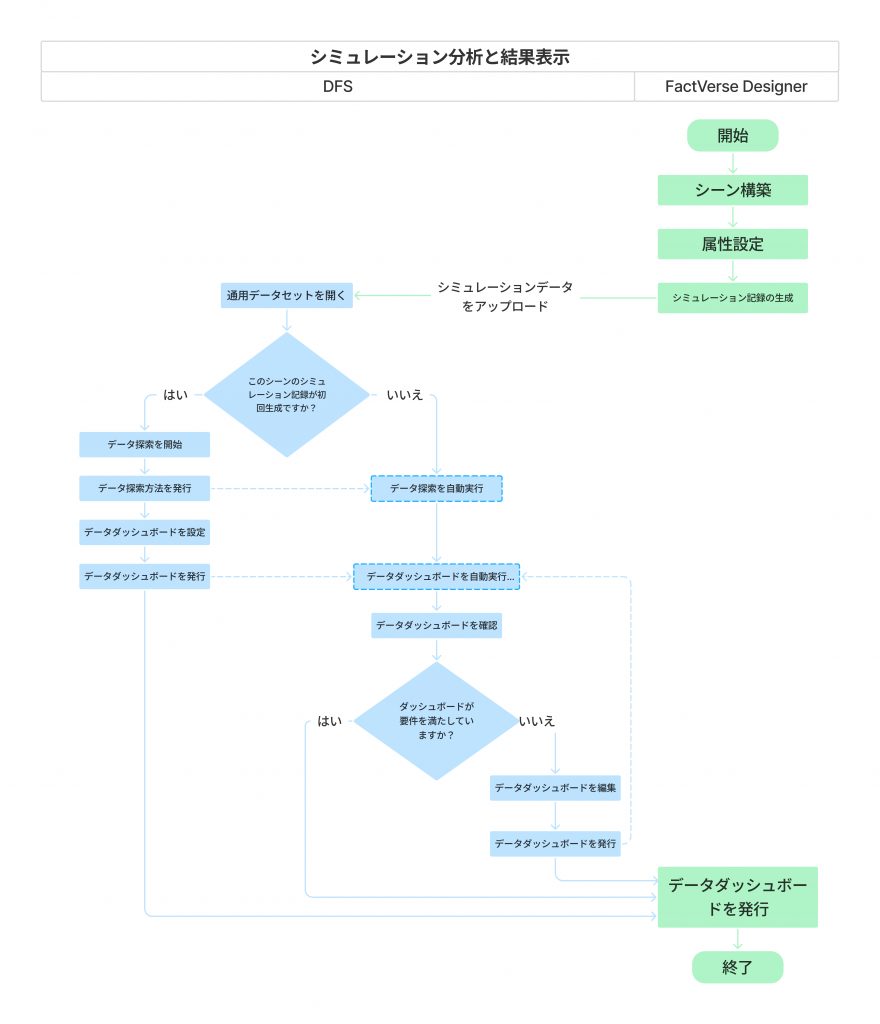
ステップ 1 事前準備
- シーン構築:FactVerse Designer でデジタルツインシーンを構築し、検証が必要なパラメータを設定します。
- シミュレーション記録を生成
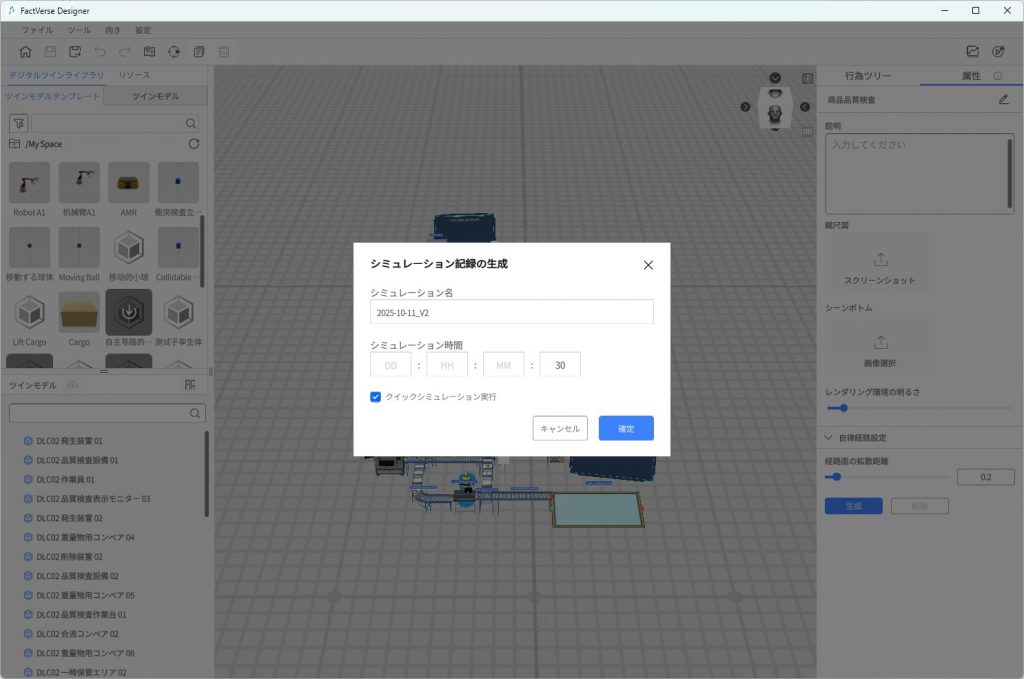
- シーンを実行し、異なる設定や実行時間に基づくシミュレーション結果を生成します。
- システムは対応するシミュレーション回顧記録を自動生成し、以降の分析データソースとして利用します。
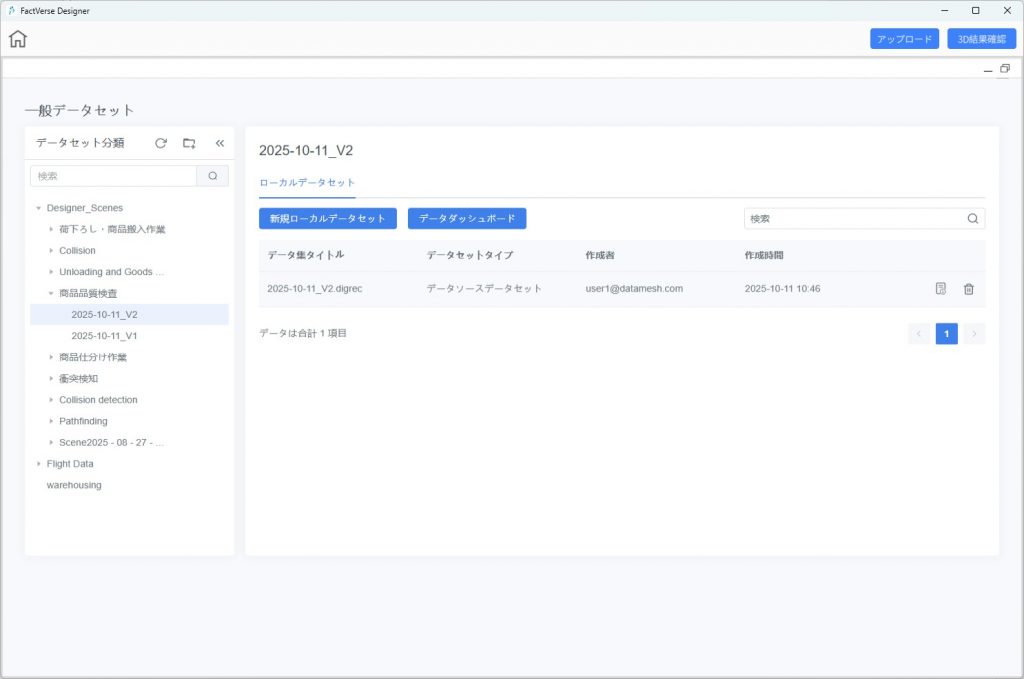
- DFS へのアップロード
- シミュレーション実行後、記録は自動的に DFS にアップロードされます。
- アップロード完了後、Designer から DFS の【共通データセット】画面を直接開いてデータ分析を行うことができます。
ステップ 2 データ探索と公開
本例でデータ探索を行う目的:
- シミュレーション回顧記録を分析可能な結果データセットへ変換する。
- ダッシュボード表示に必要なデータ入力を提供する。
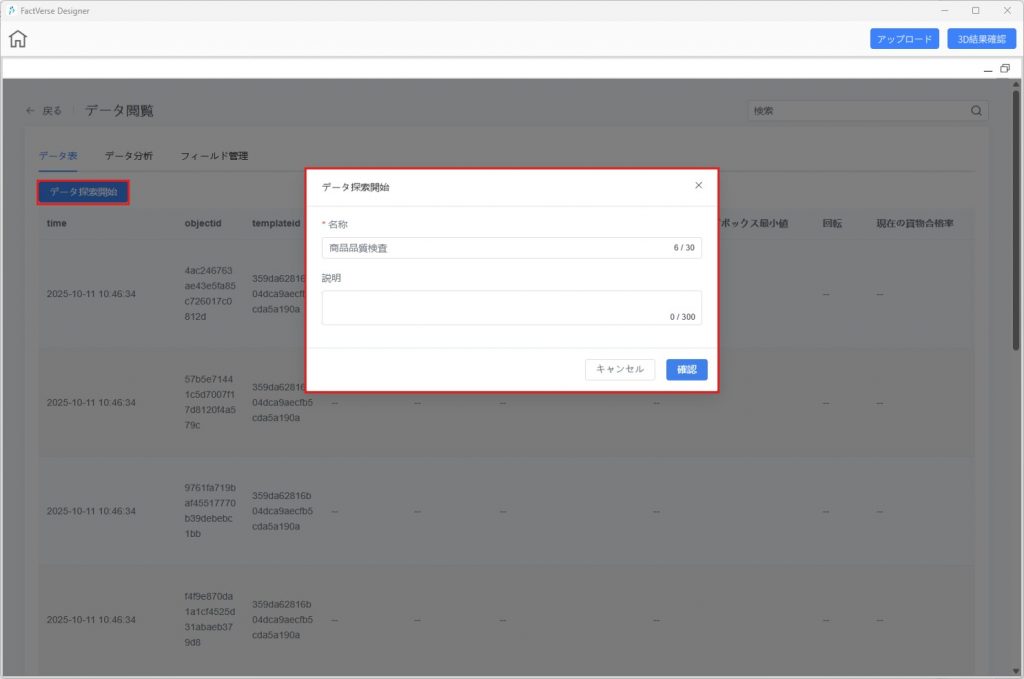
- データ探索の開始
- 共通データセット分類ディレクトリから、今回アップロードしたデータセットを選択。
- データセットの「データ表示」ページに入り、「データ表」タブで【データ探索を開始】ボタンをクリックしてデータ探索を実行。
- データ探索方法の公開
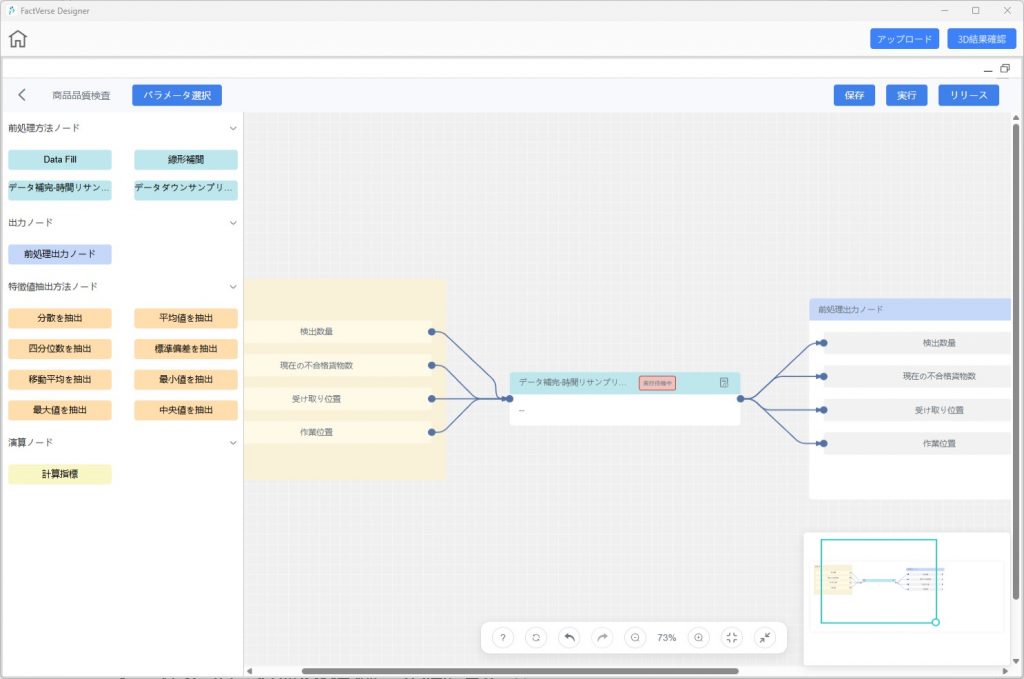
- 探索フローメソッドを構築し、公開します。
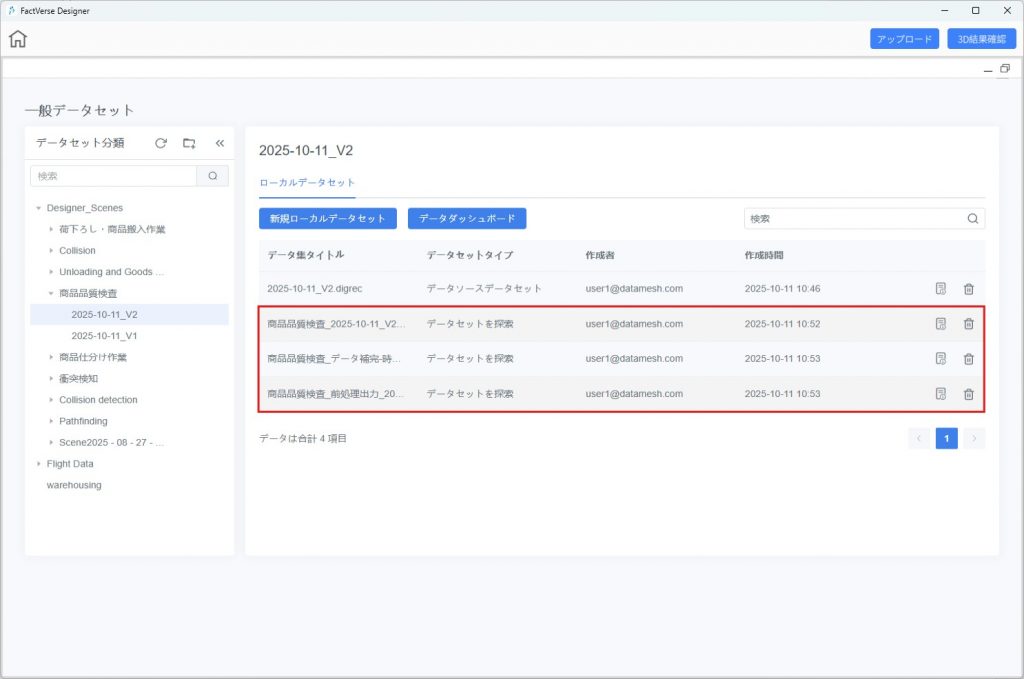
- 実行結果は新しい探索データセットとして出力されます。
- 以降、新たにシミュレーション記録が生成されるたびに、システムは自動的に探索タスクを実行します。
ステップ 3 結果の再利用と分析
- データダッシュボードの構築
- 探索結果を表示するためのデータダッシュボードを作成・保存します。
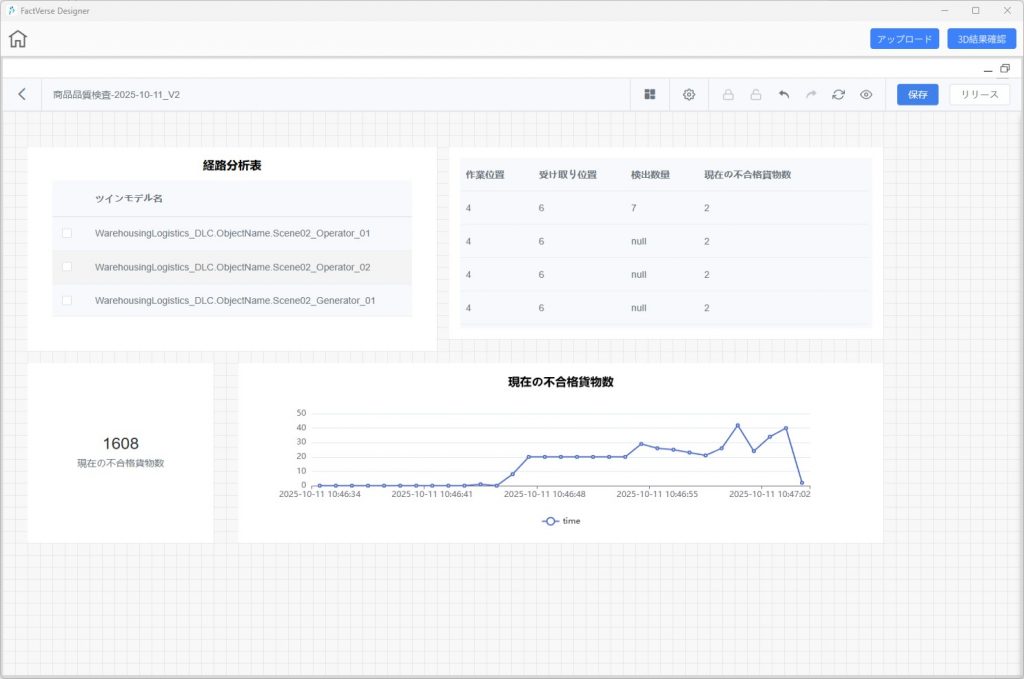
- データダッシュボードの公開
- ダッシュボードを公開すると、新たなシミュレーション記録が生成されるたびに、システムは自動的にデータ探索結果を更新し、ダッシュボードをリフレッシュします。
- 確認と分析
- 「3D 結果表示」を通じてシミュレーションプロセスを再現し、経路の妥当性や効率を評価、潜在的な最適化余地を発見し、より良いスケジューリング案を立案します。
- 分析結果に基づきパラメータを調整し、シミュレーション記録を再生成して更新後のダッシュボード結果を確認します。
例 3:ロボットアーム実データによるデジタルツイン駆動
シナリオ概要
実際の生産現場では、ロボットアームはセンサーや制御システムとリアルタイムに連動する必要があります。
本例では、DFS を通じてロボットアームのリアルタイム稼働データストリームを接続し、デジタルツインを駆動させ、閾値を超えた場合にアラートをトリガーする方法を示します。
ステップ 1 事前準備
- アダプタインスタンスの作成
- DFS プラットフォームの【アダプタ管理】ページに入ります。
- 【新規】をクリックし、ロボットアームデータ収集インスタンスの IP とポートを入力します。
- Node-RED フローの設定
- 編集ボタンをクリックして Node-RED 編集画面に入り、データ収集およびクレンジングロジックを定義します。ロボットアームコントローラからリアルタイムデータ(関節角度、エンドエフェクタ位置など)を受信し、標準 JSON 形式に変換して DFS 内部データチャネルへ転送します。
- フローをデプロイします
ステップ 2 デバイスとツインモデルのバインド
- デバイスバインド
- 【ツインモデル関連】>【デバイスバインド】で、接続済みのロボットアームデバイスを選択します。
- デバイス詳細ページを開き、【ツインモデルを設定】をクリックします。
- 属性マッピング
- デバイス属性(例:A1Pos、A2Pos、A3Pos …)をツインモデルテンプレートの対応する関節回転属性にバインドします。
- 設定を保存すると、ロボットアームの関節リアルタイム角度がツインモデルにマッピングされます。
ステップ 3 シーン検証
- FactVerse Designer に戻り、データがバインドされたデジタルツインシーンを開きます。
- 【デバッグ再生】をクリックし、ロボットアーム各関節がリアルタイムデータで駆動して動作する様子を確認します。