
ガイドブック
シナリオコースウェア
シナリオコースウェアとは、コースウェア内の問題をシナリオ内容と関連付けた形式であり、受講者がOne端末でビジュアル的な学習や試験を行えるようにし、教育および評価のニーズに対応します。
シナリオコースウェア編集
FactVerseプラットフォームでコースウェアの作成と問題の追加を完了した後、DataMesh Studioで問題とシナリオ内容のバインドおよび設定を行います。
現在、以下の問題形式に対応しています:
問題形式 | 機能説明 |
コンテンツ閲覧問題 | 受講者が指定されたシナリオのチャプターコンテンツを設定時間視聴すると、システムが自動的に学習タスクの完了を判定します。 |
単一選択問題 | 通常型とジャンプ型の2種類の単一選択問題に対応。ジャンプ型は選択肢をシーン内のインタラクティブオブジェクト(ボタン、モデルなど)にバインド可能。 |
複数選択問題 | 複数選択に対応し、システムが設定に基づき自動採点します。 |
実技問題 | モデルのインタラクション操作に基づいて採点を行い、受講者の実践的な操作能力やプロセス習得状況を評価します。 |
コースウェア編集画面
コースウェアの編集に入る前に、講師権限をお持ちであることをご確認ください。
ホーム画面で【コースウェアを開く】をクリックし、すでにシナリオと紐付けられたコースウェアを開くか、シナリオの紐付け完了後にコースウェア編集画面へ進むことができます。
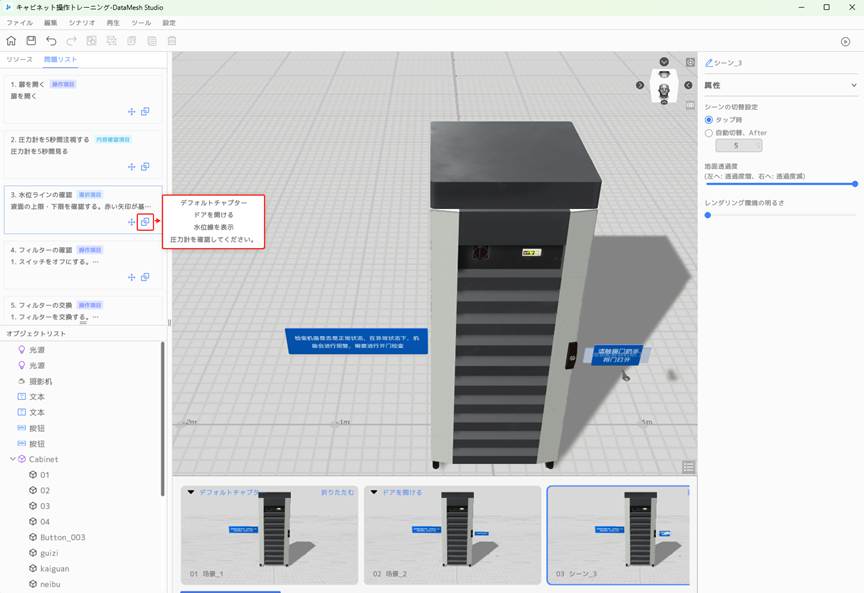
コースウェア編集画面の全体構成はシナリオ編集画面とほぼ同様ですが、以下の点が異なります。
1.【問題リスト】タブ
【リソースライブラリ】タブの隣に配置され、主に以下をサポートします:
- コースウェアの問題を確認
- コンテンツ閲覧問題・単一選択問題・複数選択問題をシナリオのチャプターにバインド
- 実技問題をインタラクションIDにバインド
- 上下移動ツール
 (最上部/上へ移動/最下部/下へ移動)を使って問題順序を調整
(最上部/上へ移動/最下部/下へ移動)を使って問題順序を調整

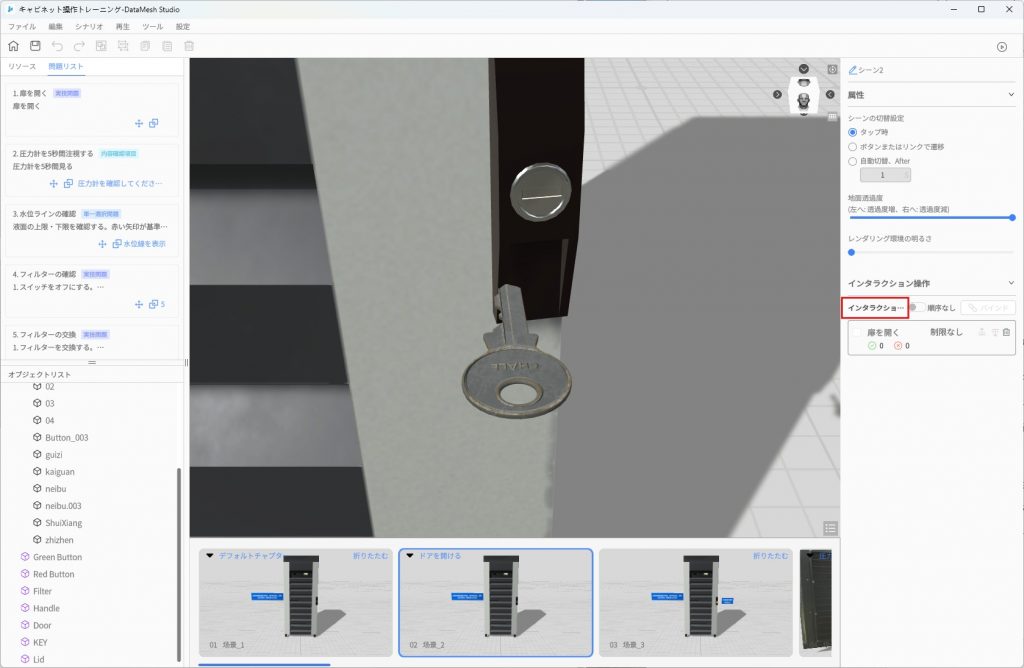
2.インタラクション編集
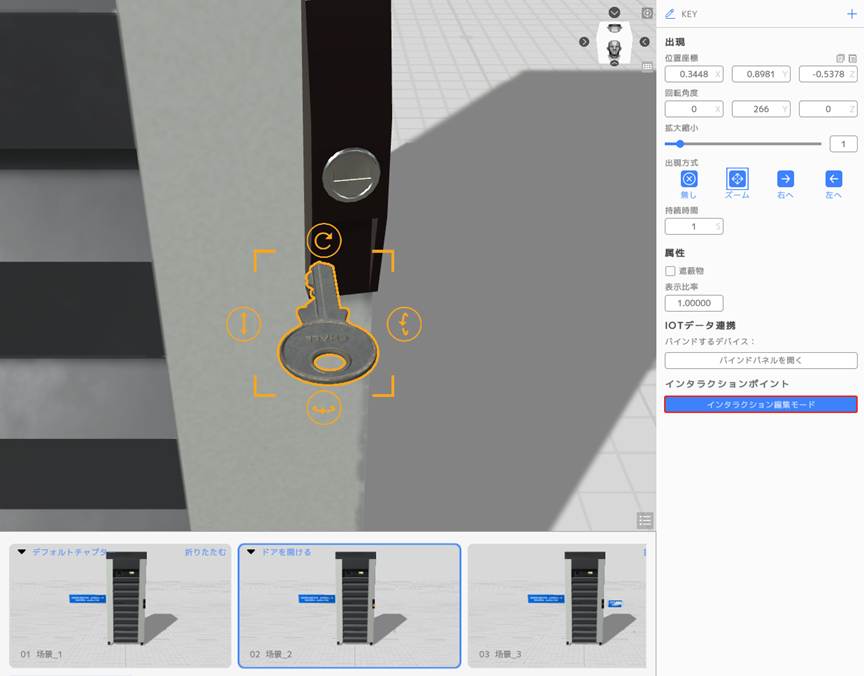
モデルまたはサブオブジェクトを選択すると、プロパティパネルに【インタラクション編集モード】ボタンが表示されます。
このボタンをクリックするとインタラクション編集モードに入り、選択したモデルに対して、目標位置や回転角度などのインタラクション操作を設定できます。
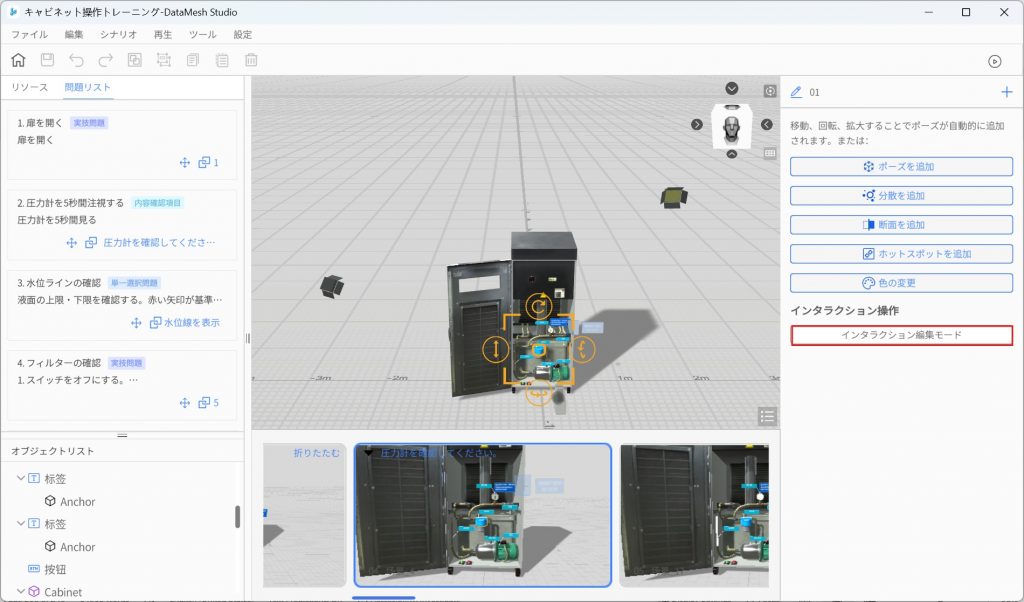
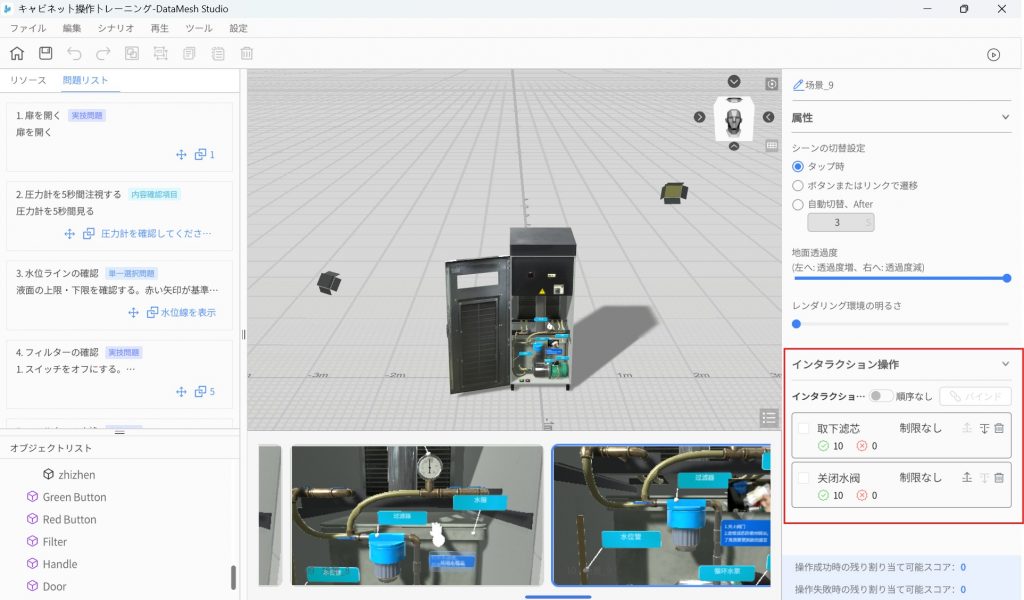
作成が完了すると、シーンの[プロパティ]パネルに「インタラクション操作リスト」が表示されます。具体的な操作手順については、「インタラクション操作問題の編集」チャプターをご参照ください。
3. 役割の評価タイプ設定
課題編集の過程では、すべてのオブジェクトに対して、異なるモードでの表示ルールを設定できます。
これにより、学習や試験の目的に応じて、学習モードおよび試験モードにおけるオブジェクトの可視性を柔軟に制御し、学習の誘導効果を高めるとともに、試験の公平性を確保することが可能です。
表示モード | 説明 |
学習モードのみ表示 | 学習時のみ表示され、試験時には自動的に非表示になります。学習のガイドや説明提示に使用します。 |
試験モードのみ表示 | 試験時のみ表示され、試験に必要な案内や提示内容の表示に適しています。 |
全モード表示 | 学習モード・試験モードの両方で表示され、常時表示が必要な固定案内などに使用します。 |
キャラクターのプロパティパネル内にある 「キャラクター評価タイプ」 設定項目から設定できます。
補足:この機能は、矢印・テキスト説明・注釈アイコンなどの案内用キャラクターに適しています。重要なインタラクションモデルには使用しないことを推奨します。

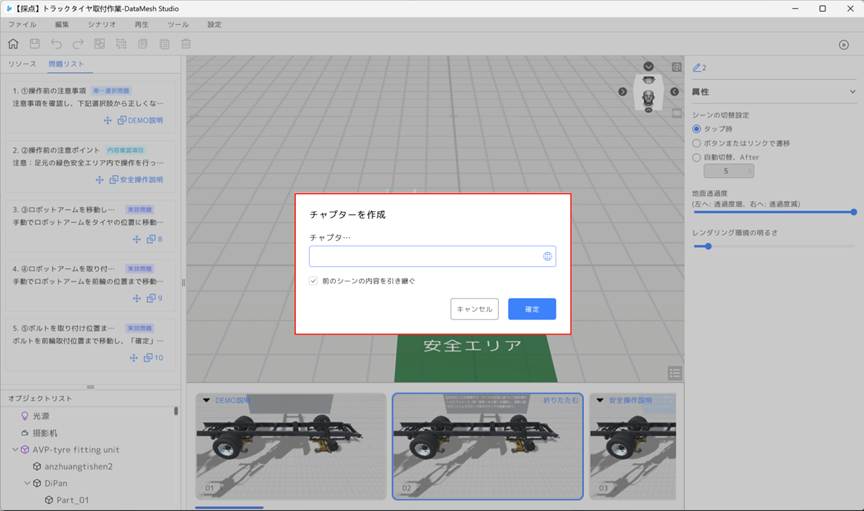
シナリオコースウェア編集フロー
シナリオコースウェアの編集は、主に以下の2つの段階に分かれます。
第1段階:コースウェアの準備(FactVerseプラットフォームで実施)
- コースウェアの作成:名称、タイプ、合格点などの基本情報を設定します。
- 問題の追加:内容閲覧問題、単一選択問題、複数選択問題、実技問題を追加します。
- コースウェアの公開:DataMesh Studioでのシナリオ紐付けや編集に備えます。
- トレーニンググループの作成:学習者に学習・試験タスクを割り当てます。
※この作業は、Studioでシナリオコースウェアを編集した後に実施することも可能です。
詳細な操作は『FactVerseプラットフォームユーザーマニュアル』の「学習管理」チャプターを参照してください。
第2段階:コースウェア内容の編集(DataMesh Studioで実施)
注意:推奨するのは、コースウェアを作成した際と同じバージョンのDataMesh Studioで閲覧・編集することです。新しいバージョンで作成されたコースウェアを古いバージョンで開くと、問題形式の構造更新により互換性の問題が発生し、一部の内容が正しく表示・編集できない可能性があります。
- シナリオの紐付け:コースウェアと指定のシナリオファイルを紐付けます。
- 問題の編集:コースウェア編集画面で、各問題の具体的な動作やインタラクション方法を設定します。
問題タイプ | 操作説明 |
内容閲覧問題 | 該当するチャプターに紐付けます。 |
単一選択問題 | チャプターに紐付けた上で、選択肢をボタンやモデルなどのインタラクションオブジェクトに紐付けることでジャンプ型の選択問題を実現できます。 |
複数選択問題 | 該当するチャプターに紐付けます。 |
実技問題 | インタラクションIDに紐付け、目標位置・回転角度・得点ルール・操作順序を設定できます。 |
- 教材のプレビュー:編集が完了したら、Studio内でプレビューとテストを行い、インタラクションのロジックや採点機能が正常に動作することを確認します。
シナリオのバインド
シナリオのバインドは、コースウェアとシナリオ内容を関連付けるための重要なステップです。
※注意:1つのコースウェアには1つのシナリオしかバインドできません。バインド後に他のシナリオへ切り替えることはできません。
操作手順
1. ホーム画面で「コースウェアを開く」ボタンをクリックします。
2. コースウェア一覧から対象のコースウェアを選択し、「開く」ボタンをクリックします。
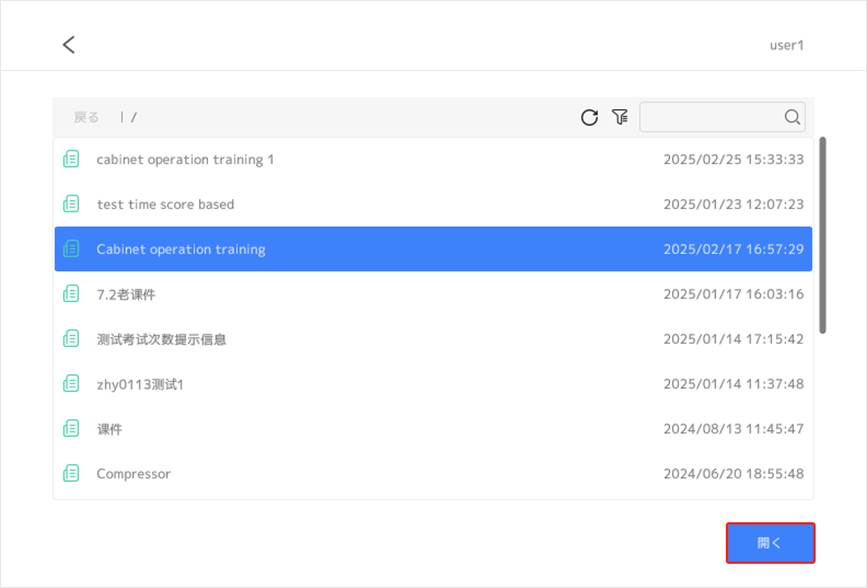
3. バインドしたいシナリオを選択し、「開く」をクリックします。
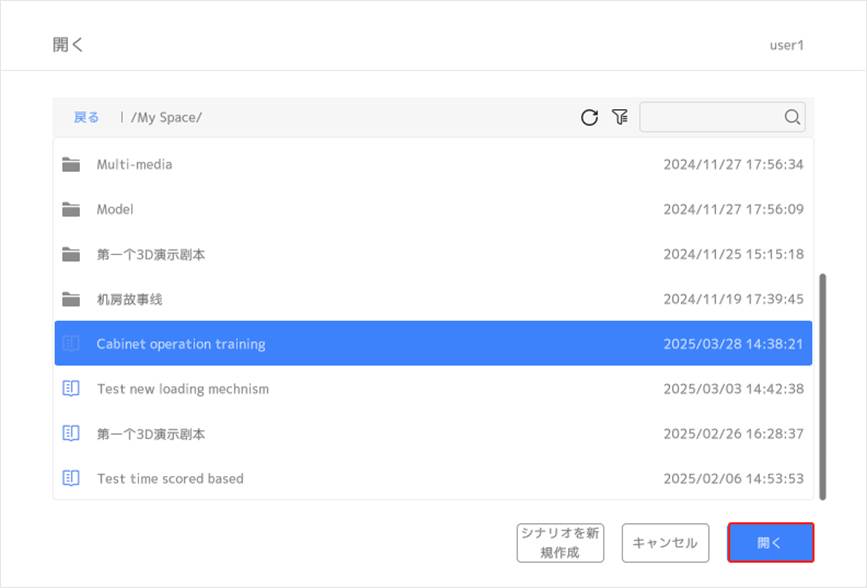
※適切なシナリオがない場合は、「シナリオを新規作成」をクリックして空のシナリオを作成できます。
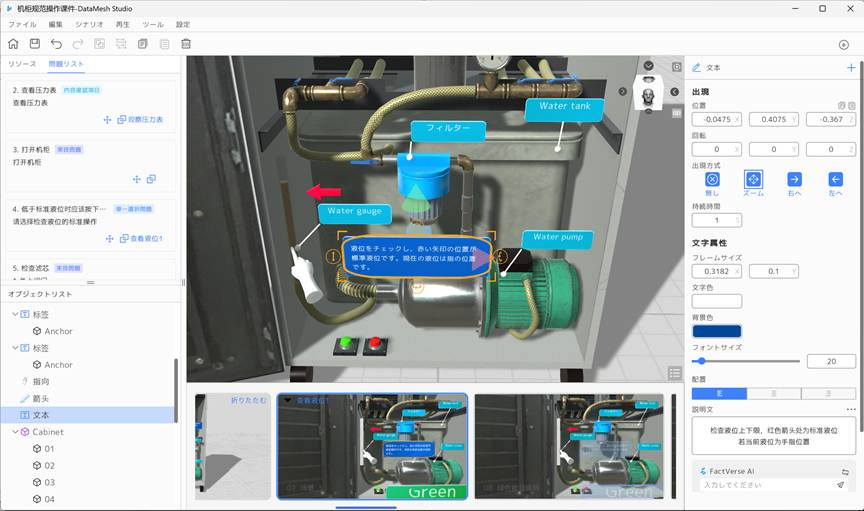
内容閲覧問題の編集
内容閲覧問題は、受講者に特定の情報や内容に注目させるために使用され、重要なポイントの提示や説明に適しています。この問題タイプでは、達成条件として最低視聴時間を設定できます。受講者は、指定されたチャプターの内容を設定時間以上視聴し、「確認」または「次の問題」ボタンをクリックすることで、システムが完了と判定し得点を付与します。視聴時間が条件を満たさない場合は未達成とみなし、得点は0点となります。
操作手順
- 教材を開く:DataMesh Studioで、すでにシナリオが紐付けられている教材を開きます.
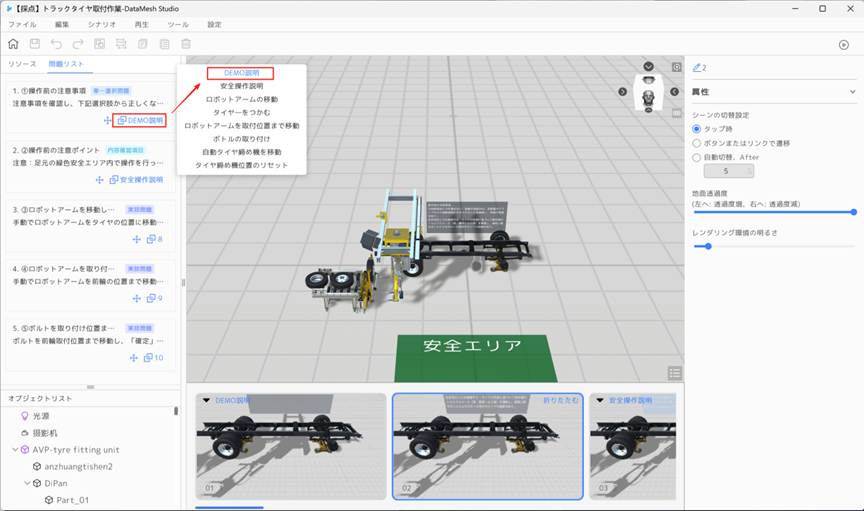
- チャプターの内容を準備:問題に紐付けるチャプターを作成または編集し、その問題に関連するシーンページや表示内容(テキスト、ヒント、図など)を追加します。
- チャプターリストを開く:問題リストで、該当問題の紐付けボタンをクリックし、チャプターリストを表示します。
- チャプターを紐付ける:チャプターリストから対象チャプターをクリックして紐付けを行います。
注意:各チャプターには1つの問題しか紐付けできません。そのチャプターにすでに他の問題が紐付いている場合、新しい問題を紐付ける際にシステムが既存の紐付け解除を確認します。承認すると、元の問題が自動的に解除され、新しい問題の紐付けが完了します。
単一選択問題の編集
シナリオ教材内の単一選択問題は、通常型単一選択問題とジャンプ型単一選択問題の2種類のインタラクション形式をサポートしています。
講師は、学習目標・インタラクション方法・授業状況に応じて適切なタイプを選択できます。
タイプ | 特徴 | 使用シーン |
通常型単一選択問題 | すべての選択肢が問題パネルにまとめて表示され、受講者は選択肢をクリックして解答 | 内容理解、手順判断、基礎知識テストなど |
ジャンプ型単一選択問題 | 各選択肢をシーン内のインタラクションオブジェクト(ボタン、モデル等)に紐付け、クリックでシーン遷移をトリガー | 探索型学習、多ルート分岐、操作判断練習など |
通常型単一選択問題の編集手順
通常型単一選択問題は、受講者の知識点に対する理解・判断を評価するために適しており、選択肢は問題パネル形式で集中表示され、直接クリックして解答できます。
例題:
機械状態を確認する最初の手順は?
A. 防護服を着用する ❌
B. 電源を抜く ❌
C. キャビネットの扉を開ける ✔
D. 掃除する ❌
操作手順
前提条件:
- FactVerse プラットフォームで教材を作成し、単一選択問題を追加済みであること
- 教材が発行され、シナリオと紐付けられていること
DataMesh Studio での操作:
1. 教材を開く:DataMesh Studioで、シナリオが紐付いている教材を開きます。
2. 問題用のチャプターを作成:問題に関連するチャプター(例:「点検準備」)を作成し、対応するヒント、テキスト・画像コンテンツ、またはシーン情報を追加します。
3. 問題をチャプターに紐付ける:問題の紐付けボタンをクリックし、ポップアップしたチャプターリストから対象の章を選択して紐付けを完了します。
注意:各章には1つの問題しか紐付けできません。
既に他の問題が紐付けられている章を再度紐付けしようとした場合、システムが「元の紐付けを解除するか」を確認するメッセージを表示します。
確認後、自動的に元の問題の紐付けが解除され、新しい問題の紐付けが完了します。
4. 保存とプレビュー:すべての問題のチャプター紐付けが完了したら、シナリオ課題を保存し、プレビューを行います。
💡 プレビュー時には、該当問題のすべての選択肢が問題パネルに表示され、クリックすることで解答できます。
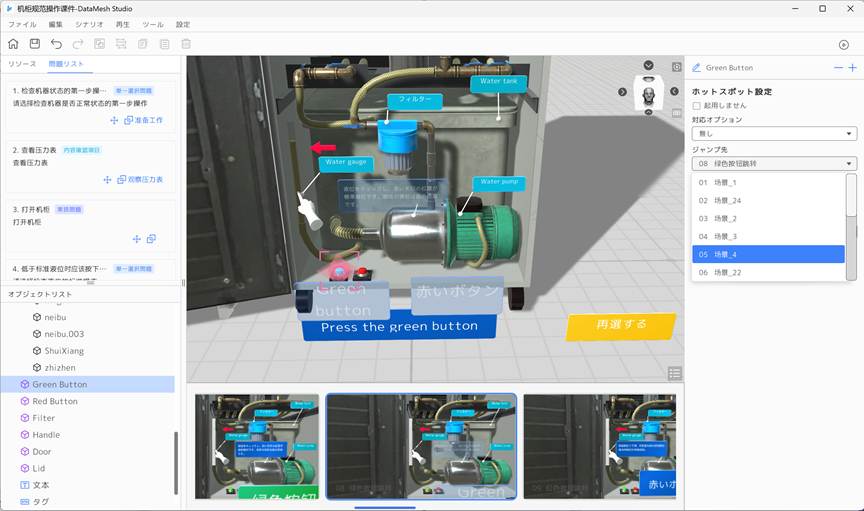
ジャンプ型単一選択問題の編集手順
ジャンプ型単一選択問題は、実際のシナリオを模擬し、異なる結果分岐を判断させる学習場面に適しています。問題の選択肢は、シーン内のインタラクティブオブジェクト(ボタン、モデルなど)として提示され、クリックするとジャンプが実行されます。
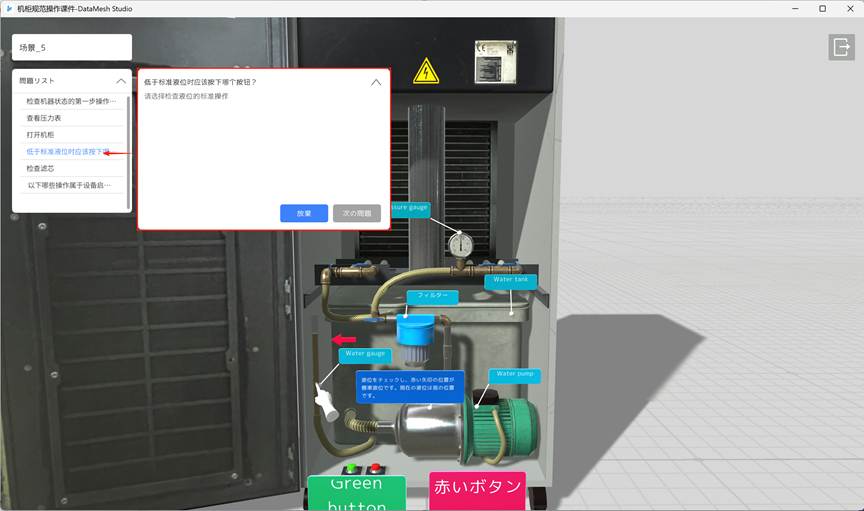
例題:
液位が基準より低い場合、どのボタンを押すべきですか?
「緑ボタン」:[補充成功]シーンへジャンプ
「赤ボタン」:[エラー表示]シーンへジャンプ
操作手順
前提条件:
- FactVerseプラットフォームで課題を作成し、単一選択問題を追加済みであること
- 課題が公開され、シナリオとバインド済みであること
DataMesh Studioでの操作:
1. 課題を開く:DataMesh Studioでシナリオとバインド済みの課題を開く。
2. 問題チャプターの作成:インタラクションを含むチャプター(例:「液位チェック」)を作成し、シーンにインタラクティブオブジェクト(赤ボタン、緑ボタンなど)を追加する。

3. 绑問題をチャプターにバインドする:問題のバインドボタン![]() をクリックし、ポップアップしたチャプター一覧から対象のチャプターを選択してバインドを完了します。
をクリックし、ポップアップしたチャプター一覧から対象のチャプターを選択してバインドを完了します。
注意:各チャプターには1つの問題しかバインドできません。すでに他の問題がバインドされている場合、新しい問題をバインドしようとすると、既存のバインドを解除するかどうかの確認メッセージが表示されます。確認すると、元の問題は自動的に解除され、新しい問題がバインドされます。
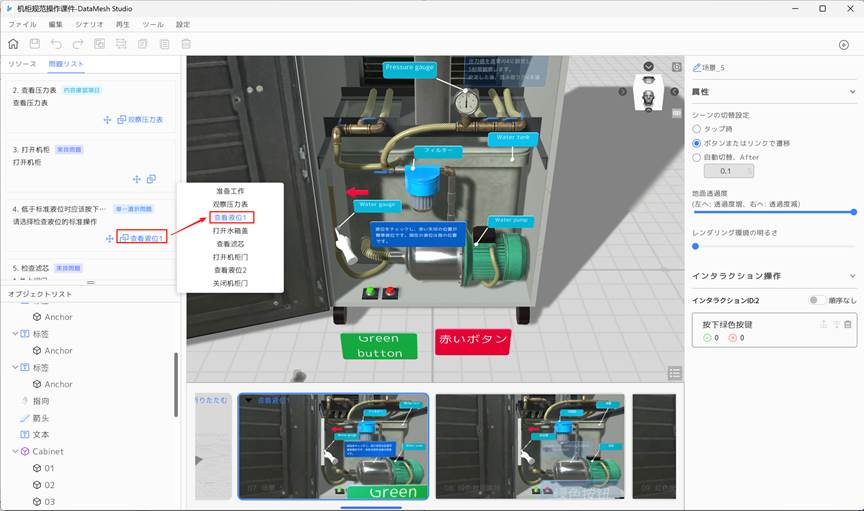
4. 選択肢をインタラクティブオブジェクトにバインドする:各選択肢を、シーン内の特定のインタラクティブオブジェクトにバインドします。バインド後、その選択肢は問題パネルには表示されず、インタラクティブオブジェクトを通して提示されます。

注意事項:
- すべての選択肢をジャンプ型インタラクティブオブジェクトにバインドする必要があります:ジャンプ型単一選択問題のすべての選択肢は、必ず特定のインタラクティブオブジェクトにバインドしてください。バインドされていない選択肢は依然として問題パネルに表示され、表示の混乱や受講者の解答体験に悪影響を及ぼす可能性があります。
- 1つの選択肢を複数のオブジェクトにバインド可能:同じ選択肢を複数の異なるインタラクティブオブジェクトにバインドすることができます。各オブジェクトには異なるジャンプ先ページを設定できますが、採点結果はバインドされた選択肢に基づいて決まり、ジャンプ先には依存しません。
推奨:同一選択肢を複数オブジェクトにバインドする場合は、論理の明確化のため、同じジャンプ先を設定することを推奨します。異なるページへジャンプさせる場合は、必ず問題の論理が合理的で、かつ誘導が明確であることを確認してください。
5. ターゲットシーンページの追加:各選択肢にジャンプ先(例:「正解フィードバックページ」、「誤答提示ページ」など)を設定し、すべての経路にジャンプ先がある状態にしてください。
6. 戻り機能の設定(任意):ジャンプ後のシーンに「前のページへ戻る」や「再選択」ボタンを追加し、受講者が再び問題シーンに戻って選択操作を行えるようにします。
注意:問題パネル上の【次の問題】をクリックした場合のみ、システムは自動的に採点を行い結果を表示します。そのため、ジャンプ先の結果ページに戻り機能を追加することで、学習時のインタラクション性や試行性を高めることができます。
7. ジャンプ先のターゲットシーンの設定:
- ボタン型オブジェクトの場合:プロパティ欄で「ターゲットシーン」を設定します。
- モデル・モデルの子オブジェクト・画像型オブジェクトの場合:「リンク」アクションを使用してジャンプのロジックを設定します。
「ジャンプしない」オプションについて:
- 【ジャンプしない】にチェックを入れると、【対応する選択肢】、【ターゲットシーン】、【継続時間】の各項目が自動的に折りたたまれ、内容がクリアされ、既存の設定は無効になります。
- 【ジャンプしない】のチェックを外した場合は、【対応する選択肢】と【ターゲットシーン】の内容を再設定する必要があります。
8. 保存とプレビュー:すべての問題のバインドが完了したら、シナリオ付きコースウェアを保存し、プレビューを実行します。

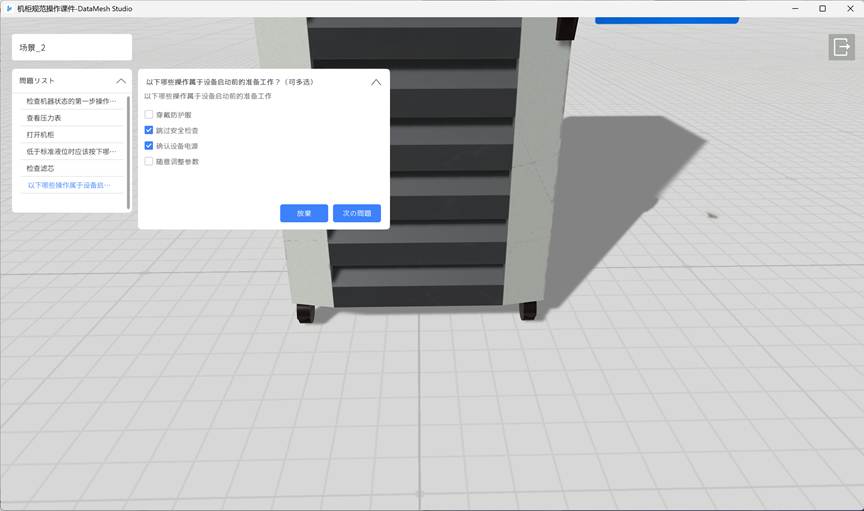
複数選択問題の編集
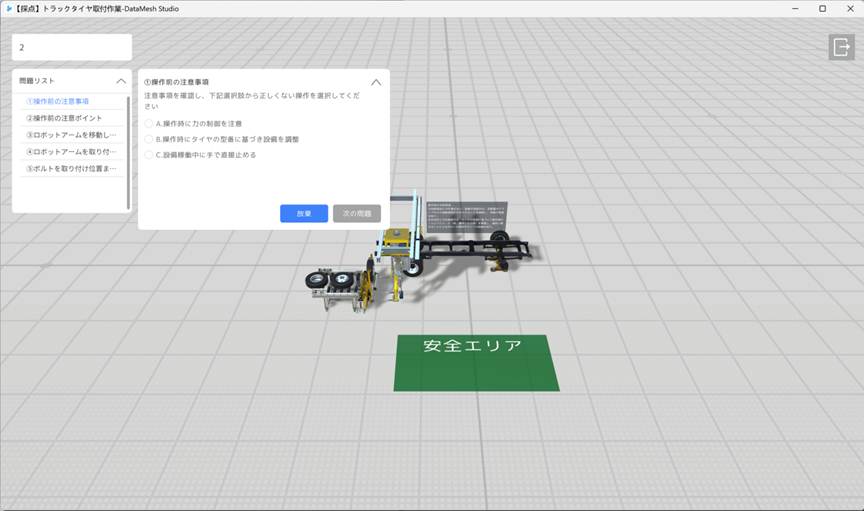
複数選択問題は、受講者が複数の正解を見分けられるかを確認するための問題形式です。内容理解、手順判断、総合的な選択などに利用されます。
例題:
以下の操作のうち、設備起動前の準備作業に該当するものはどれですか。(複数選択可)
A. 防護服を着用する ✔
B. 安全点検を省略する ❌
C. 設備の電源を確認する ✔
D. パラメータを適当に調整する ❌
操作手順
前提条件
- FactVerseプラットフォームでコースウェアを作成し、複数選択問題を追加していること
- コースウェアが公開され、シナリオと紐づけられていること
DataMesh Studioでの操作
- コースウェアを開く:シナリオがバインドされたコースウェアをDataMesh Studioで開きます。
- 問題チャプターを作成:問題に関連するチャプター(例:「設備起動」)を作成し、必要なヒント、図文情報、シーン内容を追加します。
- 問題をチャプターにバインド:問題のバインドボタンをクリックし、表示されたチャプター一覧から対象チャプターを選択してバインドします。
注意:1つのチャプターには1つの問題しかバインドできません。すでに他の問題がバインドされている場合、新しい問題に置き換える前に、既存バインドの解除確認が表示されます。
- 保存とプレビュー:全ての問題バインドが完了したら、コースウェアを保存し、プレビューを実行します。
💡受講者は複数の選択肢にチェックを入れて回答できます。全て正しい選択肢を選んだ場合は満点となり、以下のいずれかに該当する場合は誤答として採点されます:
- 正しい選択肢を一部選び漏らした場合
- 誤った選択肢を選んだ場合
インタラクション操作の編集
インタラクション操作問題は、シナリオ内のインタラクティブなシーンにおける受講者の操作スキルを評価するための問題形式です。
システムは、モデルの位置が基準を満たしているか、操作順序が正しいかを自動で判定し、さらに時間に基づく得点ルールを組み合わせて最終スコアを算出します。
本機能は、設備の調整・部品交換・作業手順実行などの技能訓練タスクに適しています。
編集フロー概要
前提条件
- FactVerseプラットフォームでコースウェアを作成し、実操作問題を追加済みであること
- コースウェアが公開され、シナリオとのバインドが完了していること
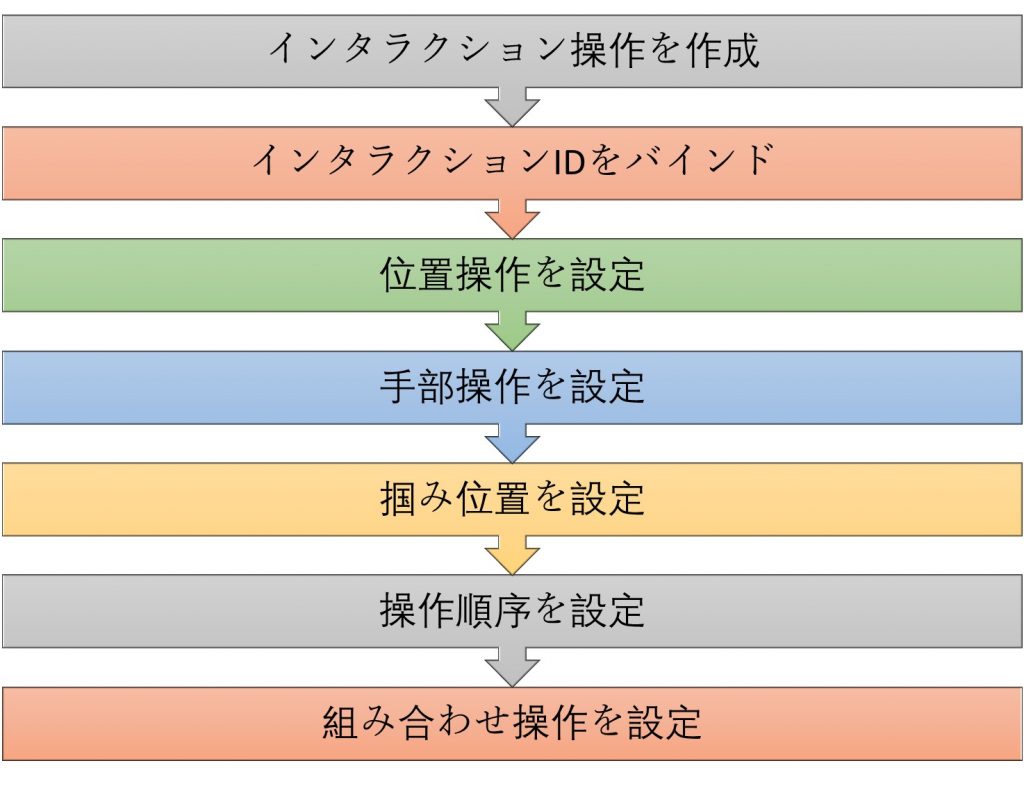
インタラクション操作問題は、受講者がシナリオ内で行う実際のインタラクション能力を評価する問題形式です。対象となる動作は、オブジェクトの位置操作、手の使用、掴み方などを含みます。以下に、編集フローの全体概要を示します。
手順 | 操作 | 説明 |
1 | インタラクション操作の作成 | シーン内で対象モデルにドラッグ、回転、結合などのインタラクション動作を設定し、インタラクションIDを生成します。 |
2 | インタラクションIDのバインド | インタラクション操作問題を対応するインタラクションIDに紐付け、採点ロジックを実際の操作に関連付けます。 |
3 | 位置操作の設定 | モデルを配置する目標位置と角度を定義し、吸着範囲、回転誤差、得点ルールを設定します。 |
4 | 手の操作設定(任意) | 使用する手のタイプ(左手/右手/両手)を指定し、正しい操作かどうかを判定します。 |
5 | 掴み位置の設定(任意) | 掴みの有効エリアと角度範囲を定義し、掴みのオフセットや得点ルールを設定します。 |
6 | 操作順序の設定(任意) | 操作の順番を重視する問題の場合、「順序ありモード」を有効化し、ステップの順序を設定します。 |
7 | 連携操作の設定(任意) | 両手で同時に行う操作(例:2つのオブジェクトを同時に掴む)を設定し、実行順序を指定します。 |
💡ヒント: 手の操作に関連する設定は Apple Vision Pro および Meta Quest デバイスでのみ正常に認識・表示されます。
インタラクション操作の採点メカニズム
インタラクション操作問題は、1つまたは複数のインタラクションステップで構成されます。システムは各ステップについて、位置・手・掴みの3つの要素をもとに採点を行い、順序ルールと**時間配点(任意)**を組み合わせて最終スコアを算出します。
得点構成
評価項目 | 説明 |
ステップ得点 | 各ステップごとに独立採点。位置操作・手の操作・掴み位置の3カテゴリを含む。 |
順序影響 | 「順序ありモード」の場合のみ、位置操作の得点に順序影響が反映されます。手と掴みは最後の操作記録を参照します。 |
時間得点(任意) | すべてのステップ得点を合計後、時間割合を掛けて最終得点を算出(FactVerseプラットフォームで設定)。 |
ステップ得点の計算ルール
各インタラクションステップの得点は、以下の3つの要素で構成されます。
評価項目 | 順序影響 | 判定条件 | 実行結果 | 得点 |
位置操作得点 | ✅ | ・ロック(吸着)されているか ・順序が正しいか | 吸着成功 | 満点 |
偏差範囲内+姿勢正確 | 偏差比率に応じて部分得点 | |||
偏差範囲内+姿勢不正確 | 失敗得点 | |||
偏差範囲外 | 失敗得点 | |||
順序誤り | 失敗得点 | |||
手の操作得点 | ❌ | 使用した手のタイプ(左/右/両手)が正しいか | 正しい手型 | 成功得点 |
誤った手型 | 失敗得点 | |||
掴み位置得点 | ❌ | 掴みが有効エリアから開始されたか/回転誤差を満たすか | 正しいエリア+姿勢正確 | 成功得点 |
偏差範囲内+姿勢正確 | 偏差比率に応じた部分得点 | |||
偏差範囲内+姿勢不正確 | 失敗得点 | |||
その他 | 失敗得点 |
💡 ヒント: 位置操作が「ロック」された時点で操作完了と見なされ、順序判定の対象となります。
吸着とロックのメカニズム
インタラクション操作では、モデルと吸着中心との距離および回転角度誤差によって、吸着とロックの発動が判定されます。
ロックされたモデルは「操作完了」として扱われ、順序判定と採点に反映されます。
吸着中心
- システムが吸着を判定するための基準点で、シナリオの原点を基準としたローカル座標です。
- デフォルトでは「目標位置」を参照しますが、必要に応じて「カスタム位置」に切り替えることができます。
判定ロジック
以下の条件を満たすと、システムは吸着およびロックを自動的にトリガーします。
- 位置条件: モデルの原点が、吸着中心を中心とした自動吸着範囲の円内にあること。
- 回転条件: モデルの姿勢角度と目標姿勢との誤差が、設定された回転許容角度以下であること。
✅ロック判定とシステム動作
状況 | 判定条件 | システム動作 |
吸着成功 | モデル原点が自動吸着範囲内かつ回転誤差範囲内 | モデルを目標位置へ自動吸着、緑色の枠線でハイライトしロック |
偏差成功 | モデル原点が偏差範囲内かつ回転誤差範囲内(未吸着) | 現在位置を維持、緑色枠でロック |
未完了 | 最大偏差範囲外または回転誤差超過 | モデルはロックされず、調整可能。位置得点は失敗点となり、順序判定に含まれません。 |
図示補足
- 回転誤差角度: 目標回転を中心に円錐形の許容範囲を形成し、モデル姿勢がこの範囲内であれば「正確」と判定されます。
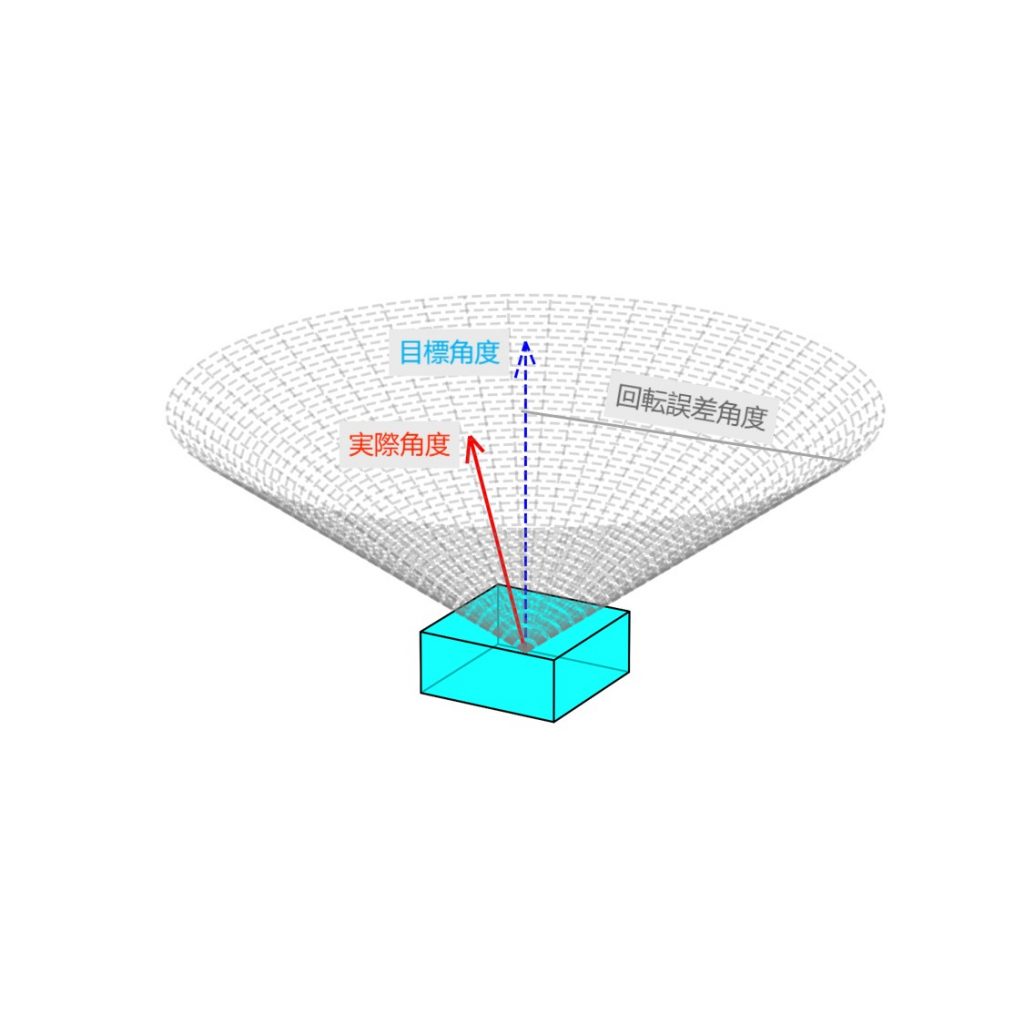
- 吸着状態のイメージ:モデルが吸着判定エリアに入ると、システムは緑色の枠線を点滅表示し、操作をロックします。
偏差量と得点比率
偏差量は、吸着が失敗しても操作がほぼ正しい場合に部分得点を与えるための設定です。これは、正確に近い操作を行った学習者を評価する目的で使用されます。
パラメータの説明
パラメータ | 説明 |
偏差量 | 目標位置を中心に複数の偏差半径を設定可能。自動吸着範囲より大きく、最大10段階まで設定可。 |
得点比率 | 各偏差範囲ごとに得点比率を設定。吸着が成功しなかった場合、この比率で部分得点を算出します。干渉オブジェクト(ディストラクター)は比率設定不可。 |
設定要件:
- 偏差量は自動吸着範囲と重複してはいけません
- 各偏差範囲は互いに重なってはいけません
- 最大10個の偏差エリアを設定可能
- 干渉オブジェクトは得点比率設定非対応(システム上で自動的にグレーアウト)
干渉オブジェクトの採点メカニズム
採点項目の中で、干渉オブジェクトは特別なモデルとして扱われます。これは、操作シーン内での誤誘導要素や関係のない部品をシミュレーションし、判断難易度を上げるために使用されます。
属性 | 説明 |
採点ロジック | ・目標位置または偏差範囲内に配置された場合 → 操作失敗と判定し「失敗得点」として記録。 ・目標位置に配置されなかった場合 → 「成功得点」として扱う。 |
偏差設定 | 偏差範囲を設定可能。ただし得点比率設定は非対応(自動的にグレーアウト)。 |
正しい対応方法 | 干渉オブジェクトを操作せず無視することで、現在のステップを正しく完了したとみなされます。 |
✅ 典型的な利用例:
「ギアAを取り付ける」タスクの場合、シーン内に「ギアB」を干渉オブジェクトとして配置し、学習者が正しい対象を識別できるかを評価します。
⚠️ 注意:
干渉オブジェクトは操作順序の判定には影響しませんが、誤って操作された場合は該当ステップの得点に直接影響します。
操作順序モード
モード | 説明 |
有序モード(デフォルト) | モデルがロックされた順序を設定済み順序と照合。 ・順序正しい → 通常採点 ・順序誤り → 位置得点を失敗点として処理 |
無序モード | 順序が得点に影響しません。各有効操作を完了するたびに対応する得点を獲得します。 |
⚠️ 「ロック」されていない操作は、順序判定の対象外です。
最終得点の計算方式
得点モード | 説明 |
直接得点(デフォルト) | 最終得点 = 各ステップ得点の合計 |
時間得点(オプション) | 最終得点 = 各ステップ得点の合計 × 時間比率(時間比率は FactVerse プラットフォームで設定) |
採点例
例 1:無序モード
問題に3つの操作ステップを設定(順序指定なし)
ステップ | 実際の結果 | 採点説明 |
ギアを配置 | 位置ロック+偏差50%、手と掴み正解 | 10×0.5 + 5 + 5 = 15点 |
レバーを引く | 位置誤り、手と掴み正解 | 0 + 5 + 5 = 10点 |
ボタンを確認 | 位置正解、手と掴み誤り | 10 + 0 + 0 = 10点 |
合計 | – | 35点 |
時間得点有効(80%) | – | 28点 |
例 2:有序モード+順序誤り
設定順序:1 → 2 → 3 / 実行順序:1 → 3 → 2
ステップ | 実際の結果 | 採点説明 |
ステップ1 | 順序正しい、全成功 | 10 + 5 + 5 = 20点 |
ステップ2 | 順序誤り、位置失敗、それ以外成功 | 0 + 5 + 5 = 10点 |
ステップ3 | 順序誤り、位置失敗、それ以外成功 | 0 + 5 + 5 = 10点 |
合計 | – | 40点 |
時間得点有効(80%) | – | 32点 |
例 3:有序モード+未完了ステップスキップ
実行順序:1 → 3 → 2 / ステップ3未完了(ロックされず)
ステップ | 実際の結果 | 採点説明 |
ステップ1 | 順序正しい、全成功 | 10 + 5 + 5 = 20点 |
ステップ2 | 順序正しい(3未完了の影響なし)、全成功 | 10 + 5 + 5 = 20点 |
ステップ3 | 未ロック、手と掴みのみ成功 | 0 + 5 + 5 = 10点 |
合計 | – | 50点 |
時間得点有効(80%) | – | 40点 |
インタラクション操作の作成
インタラクション操作問題の核心は、シーン内でモデルと行うインタラクションにあります。
各インタラクション動作は、シナリオ内で個別に設定され、採点およびバインドに使用されるインタラクションID が生成されます。
インタラクション操作 とは、ユーザーがシナリオ内でモデルまたはその子オブジェクトに対して行う特定の動作を指します。
例:ドラッグ、結合、回転など。
適用可能なインタラクション例
- モデルを指定位置へドラッグする
- 部品の分解 / 組み立て
- ボタンのクリック、部品の回転など。
注意事項:
- 各シーンページにつき、生成されるインタラクションIDは1つのみです
- 1つのインタラクションIDには、そのシーン内のすべてのインタラクション操作が含まれます
- 各インタラクションIDは1つのインタラクション操作問題にのみバインド可能です。複数の操作を個別に採点したい場合は、操作をそれぞれ別のシーンページに分けて設定してください。
操作手順
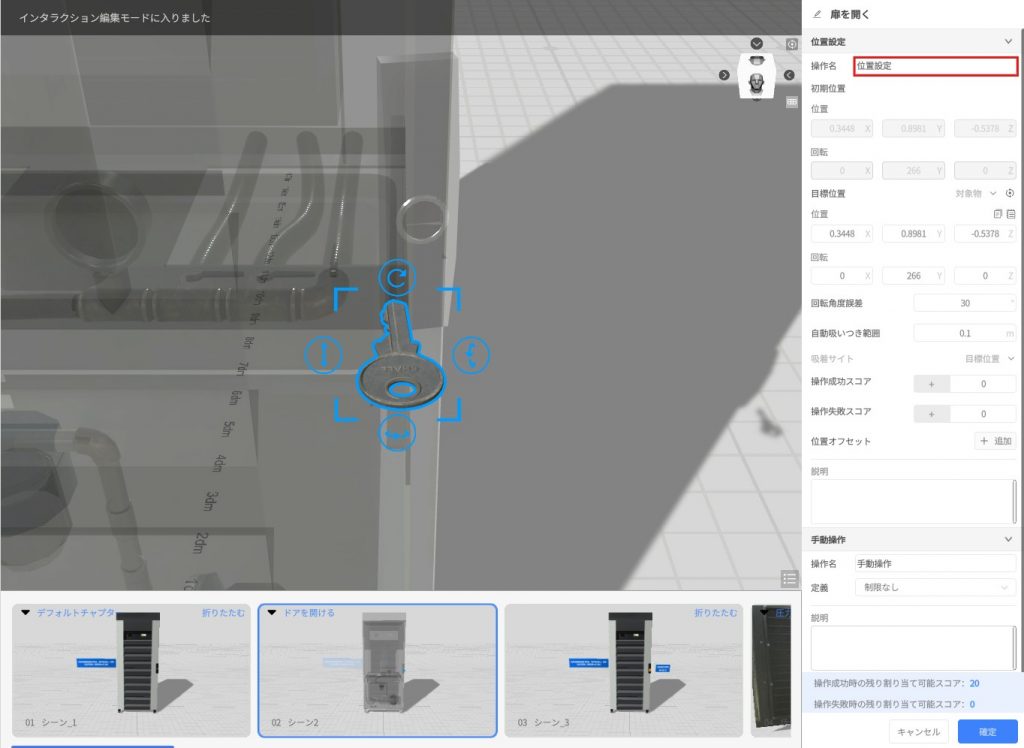
1. インタラクション編集モードに入る:
a) インタラクション操作を設定したいモデルまたは子オブジェクトをクリックします。
b) 「属性」パネルで「インタラクション編集モード」をクリックし、編集モードに入ります。
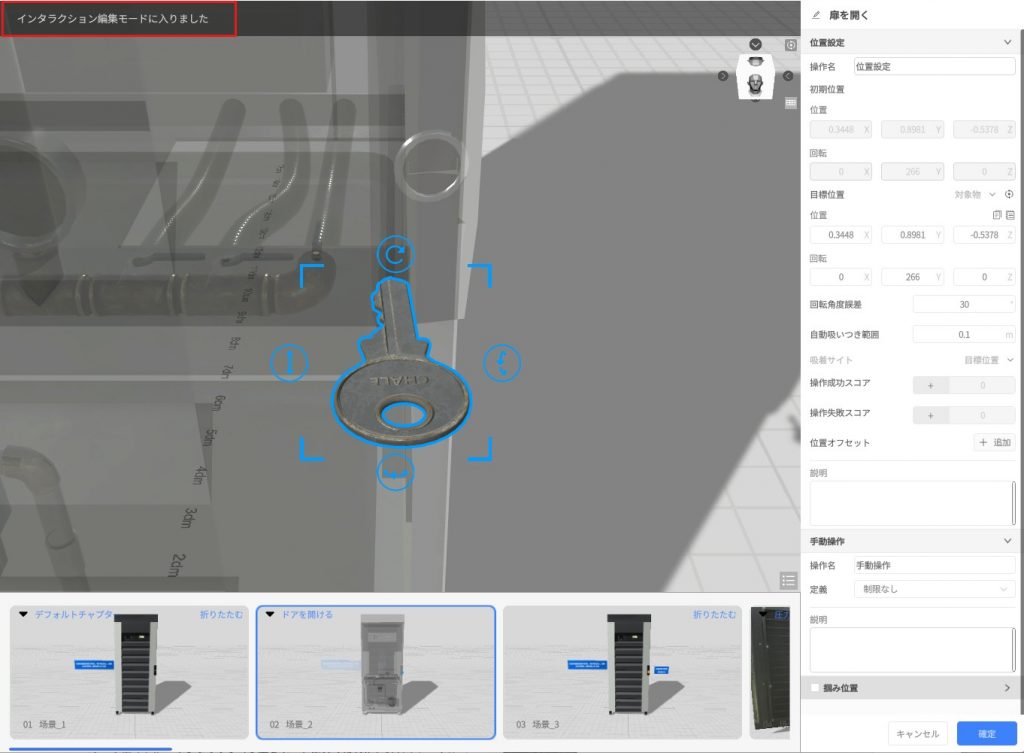
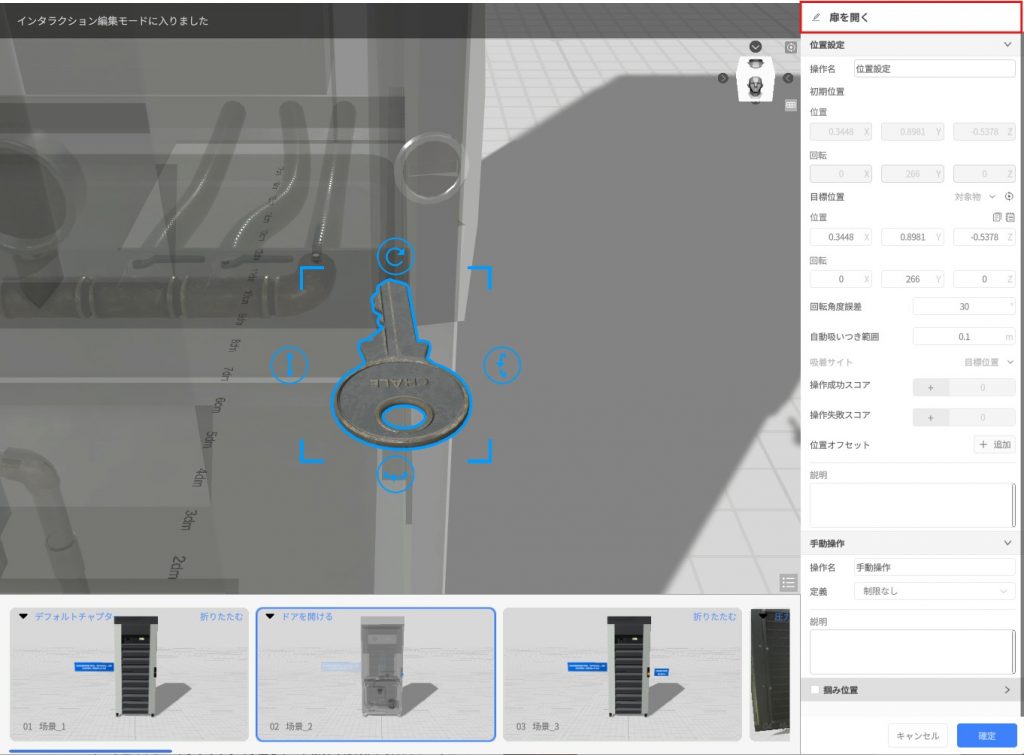
インタラクション編集モードに入ると:
- シーンエリアに「インタラクション編集モードに入りました」のメッセージが表示されます。
- 選択されたモデルは青色のハイライト付き外枠で表示され、通常の選択状態と区別されます。
2.(任意)インタラクション操作名の設定:デフォルト名は「インタラクション操作」ですが、操作内容に応じて自由に命名できます。例:「ギアの取り付け」「レバーを引く」など。後続の識別や管理が容易になります。
3. 保存してインタラクションIDを生成
📌 有効な設定がない場合、インタラクションIDは生成されません。既存のインタラクションIDを持つシーンは自動的に同一IDに統合されます。
- インタラクションIDを生成するには、少なくとも軽微な操作(モデルのドラッグや位置/回転パラメータの調整など)を実行してください。
- 【確認】ボタンをクリックすると設定が保存され、インタラクションIDが生成されると同時に編集モードを終了します。
- 【キャンセル】ボタンをクリックした場合、システムが変更内容の保存可否を確認するダイアログを表示します。
インタラクションIDをインタラクション操作問題にバインドする
インタラクション操作の設定とインタラクションIDの生成が完了したら、
そのIDを該当するインタラクション操作問題にバインドして、位置・手の操作・掴みなどの採点ルール設定を行います。
操作手順
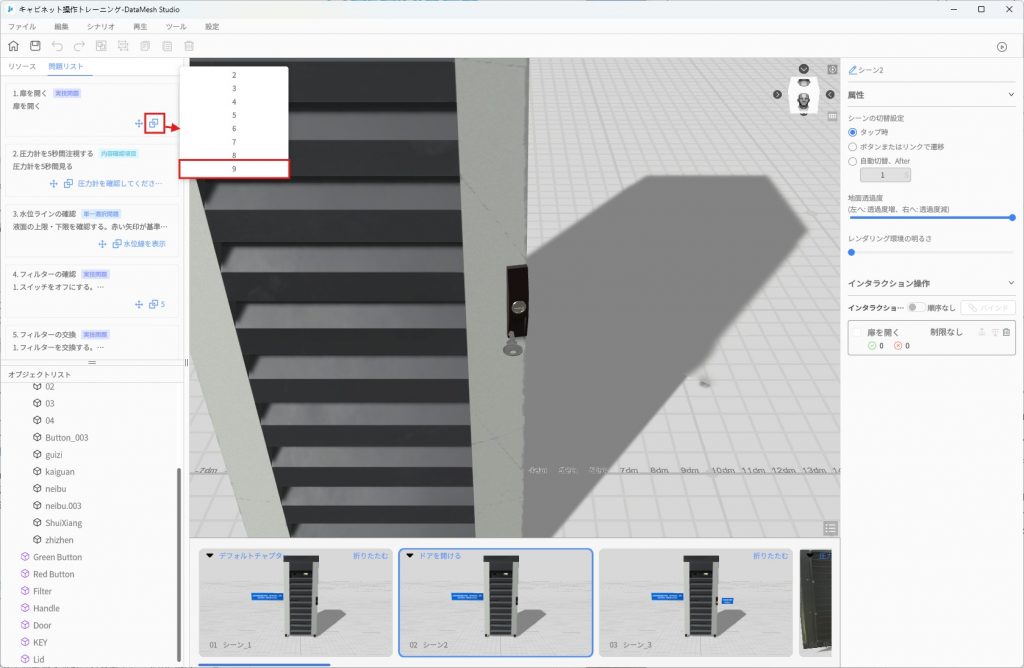
- 【問題リスト】タブで、対象のインタラクション操作問題のバインドボタンをクリックし、インタラクションIDリストを開きます。
- バインドしたいインタラクションIDを選択し、【完了】をクリックします。
バインド制限:
- 各インタラクションIDは 1つのインタラクション操作問題 のみにバインド可能です。
- 選択したインタラクションIDがすでに他の問題にバインドされている場合、システムが既存のバインドを解除するかどうかを確認します。承諾すると、旧バインドが自動解除され、新しい問題に再バインドされます。
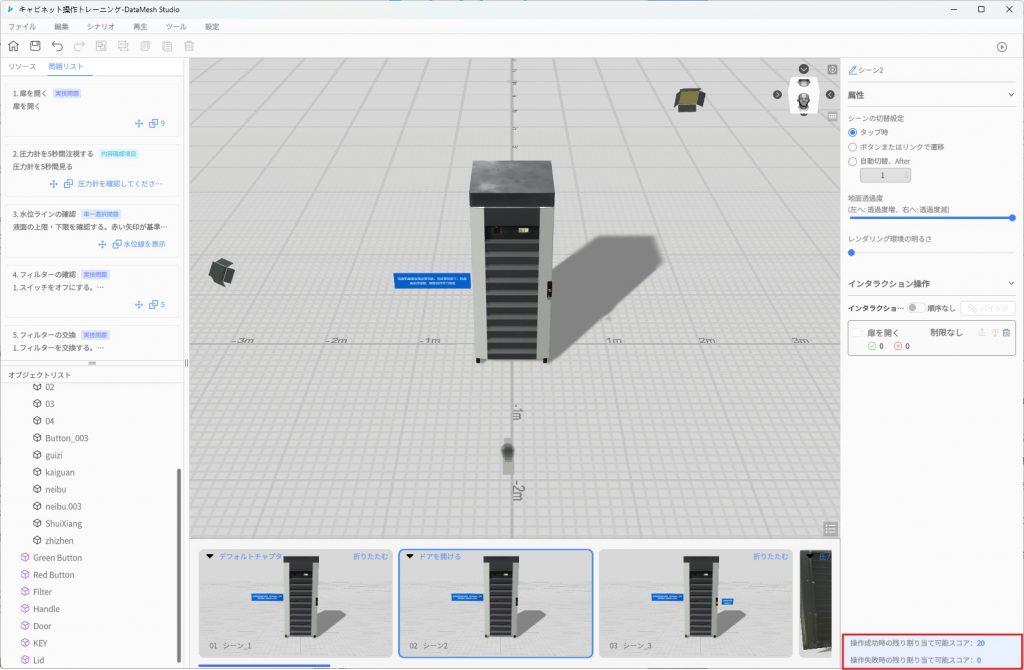
バインド完了後、現在のシーンのプロパティパネルに以下の情報が表示されます:現在の問題の「操作成功/失敗時の残り割り当て可能得点」これは、後続の位置・手の操作・掴み設定時の得点配分の参考情報として使用されます。
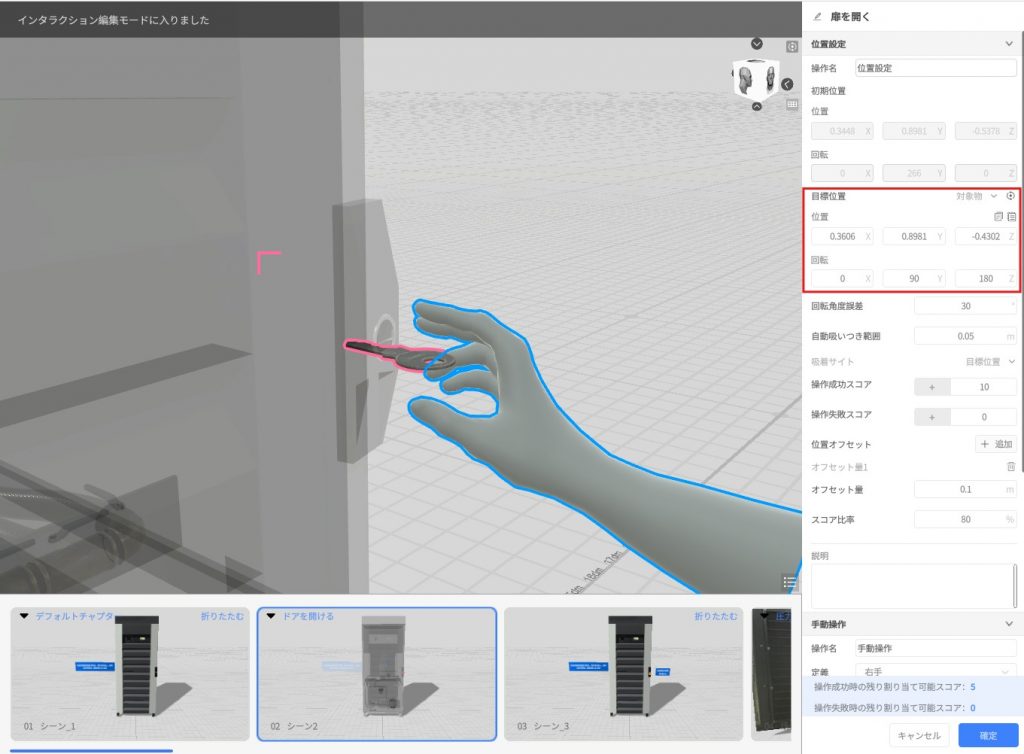
位置操作の設定
位置操作は、モデルの配置が正確かどうかを判定し、その結果を採点の基準として利用します。ユーザーは、目標位置、吸着許容範囲、得点ルールなどのパラメータを設定する必要があります。
- インタラクション編集モードに入る
以下のいずれかの方法で、対象インタラクションステップの設定画面に入ります:
- シーンでモデルを選択し、プロパティパネルの【インタラクション編集に入る】 をクリック。
- または、インタラクション操作リストで対象ステップ名をクリックして設定画面に入ります。
- 操作名の設定(任意):デフォルト名は「位置設定」ですが、操作内容に応じて任意に命名できます。例:「ギアを配置」「バッテリーを取り付け」など。この名称は、FactVerseプラットフォーム上での問題分析や参照時に使用されます。
- オブジェクトタイプの設定:対象操作が「目標動作」か「干渉動作」かを区別するために使用され、採点ロジックに影響します。
- 目標オブジェクト:対象モデルを正しい位置に配置できた場合 → 成功得点。配置が誤っている場合 → 失敗得点。
- 干渉オブジェクト:誤った対象モデル。目標位置や偏差範囲内に配置された場合 → 失敗得点。それ以外の場合 → 成功得点。

- 目標位置と回転角度の設定:
- 方法①: シーンエリアでモデルをドラッグして目標位置に移動し、角度を調整します。
- 方法②: プロパティパネルで、正確な目標位置および回転角度を数値入力します。
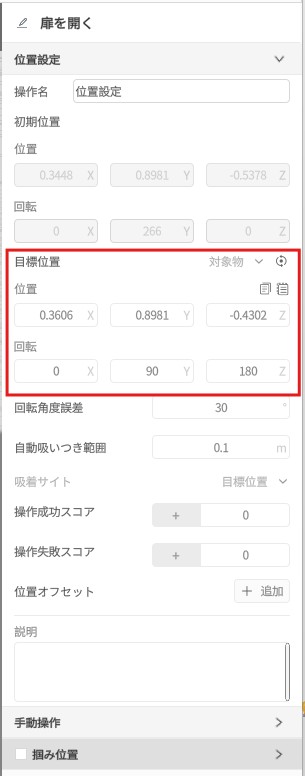
💡 位置をリセットしたい場合は、【リセット】ボタンをクリックすると初期状態に戻ります。

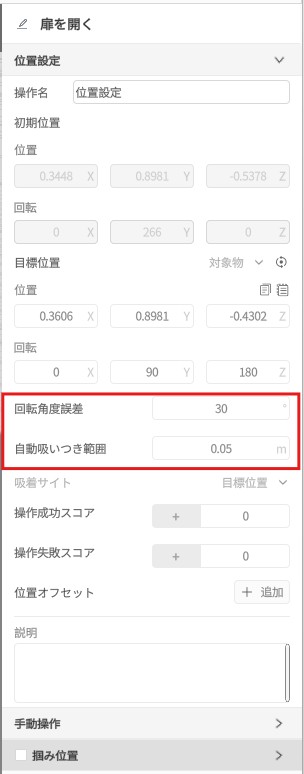
- 回転誤差角度と自動吸着範囲の設定
操作時の「許容差」を制御する設定です。モデルの落下位置や姿勢がどの程度ずれても成功と見なすかを定義します。
- 自動吸着範囲: 位置誤差の許容範囲(単位:m、デフォルト1m)
- 回転誤差角度: 姿勢誤差の許容範囲(単位:°、デフォルト30°)
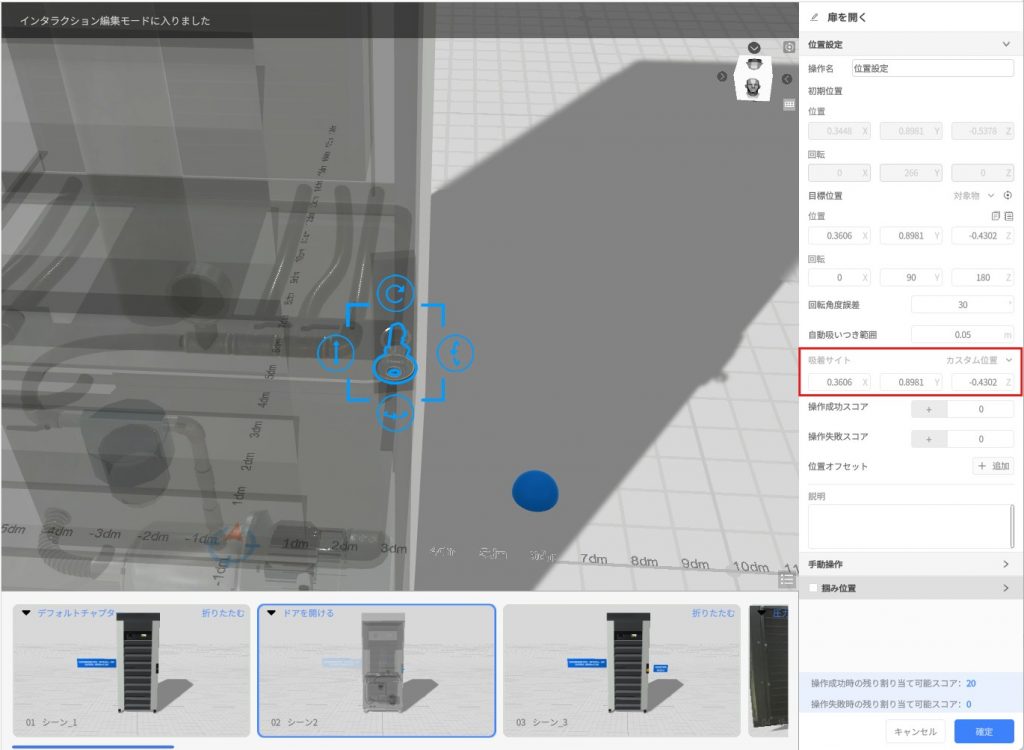
- 吸着中心の設定(任意)
- 目標位置(デフォルト): 吸着中心は設定済みの目標位置を基準とします
- カスタム位置:シーン内で吸着中心を示す小さな球体をドラッグするか、座標を手動入力して設定します。設定後、インタラクション操作編集を終了すると、この球体は自動的に非表示になります。
- 位置得点の設定
この操作の成功時/失敗時の得点を設定します。
⚠️ インタラクションIDがインタラクション操作問題にバインドされている場合のみ設定可能です。
- 操作成功得点: モデルが吸着条件を満たして正しく配置された場合
- 操作失敗得点: 吸着条件を満たさない、または手順順序を誤った場合

- 位置偏差量の設定(任意)
「ほぼ正しい」操作を認め、部分得点を与えるための設定です。
- 偏差量: 目標位置を中心に複数の半径範囲を設定します(吸着範囲と重複不可、最大10件まで);
- 得点比率: 対応する偏差範囲内で操作が完了した場合、得点を「成功得点 × 比率」で計算します。
📌 干渉オブジェクトでは得点比率設定が不要で、該当項目は自動的にグレーアウトします。

- 設定の保存:【確認】ボタンをクリックして、すべての設定を保存し、現在のインタラクション編集ステップを終了します。
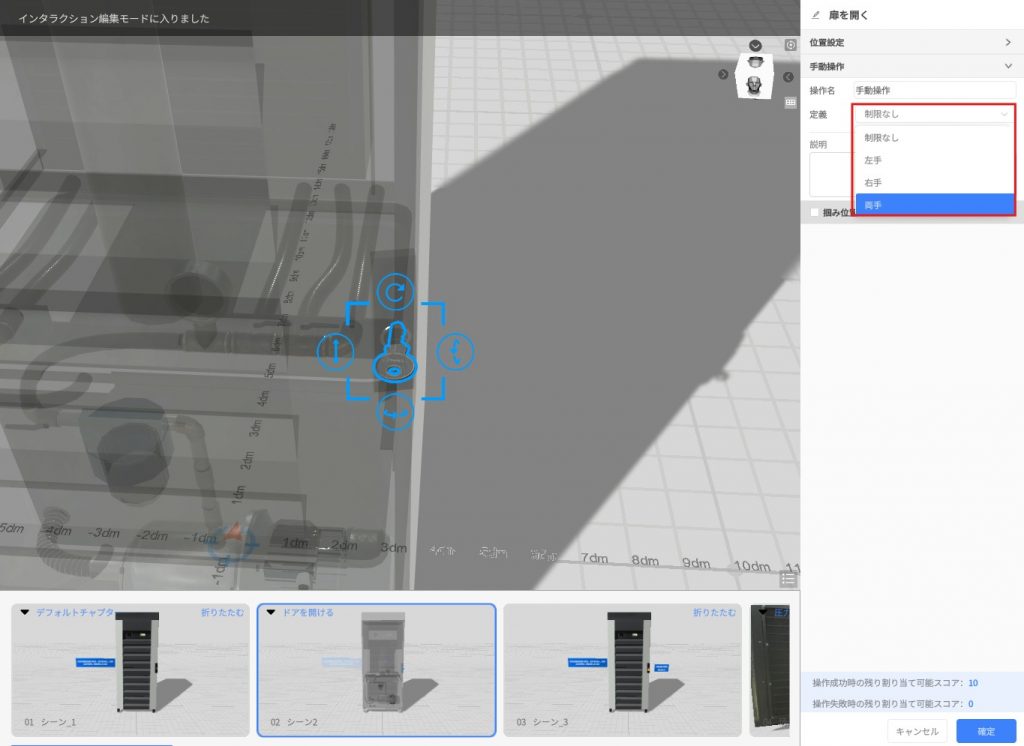
手部操作の設定
手部操作の設定は、受講者が該当ステップを完了する際に 左手・右手・両手のいずれを使用するかを制限 するために使用します。手型を制限する場合は、それに応じた採点ルールを設定する必要があります。手型を制限しない場合は、手部操作の得点設定は不要です。
- インタラクション編集モードに入る:インタラクション操作リストから対象ステップをクリック、またはシーンで対象のインタラクションリソースを選択し、【インタラクション編集に入る】をクリックします。
- 操作名の設定(任意):デフォルト名は「手部操作」ですが、操作内容に応じて識別しやすい名称に変更できます。
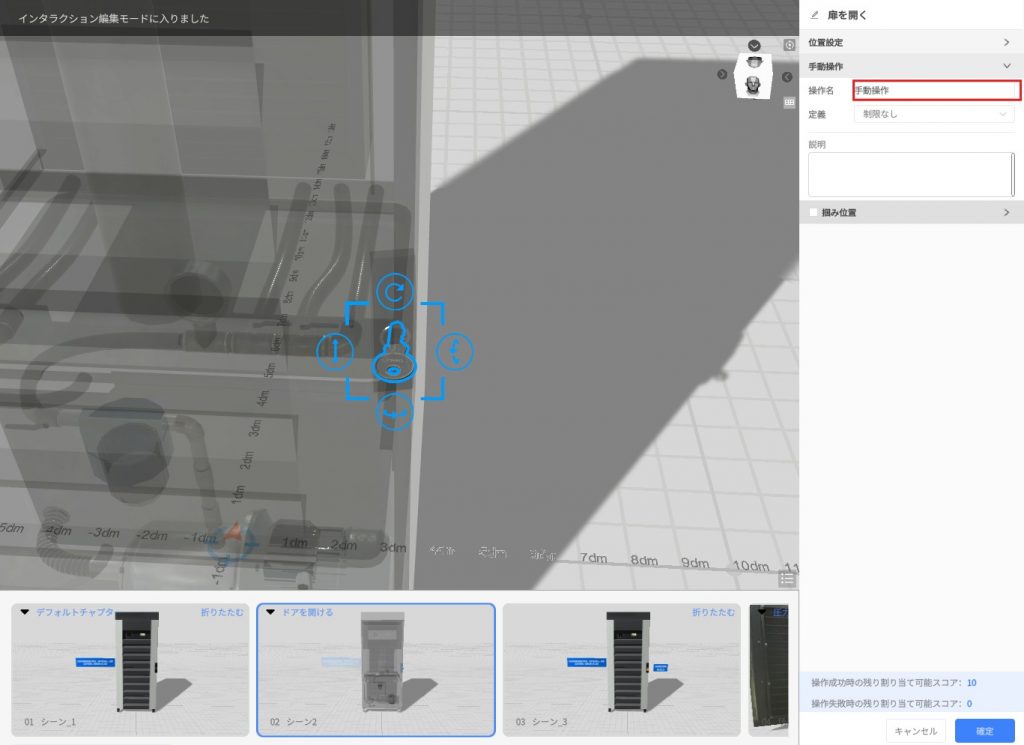
- 使用する手型の選択
「手のタイプ」設定リストから以下のいずれかを選択します:
- 制限なし(デフォルト): 手の使用を制限しません。システムはこの項目を判定しません
- 左手/右手/両手: 操作に使用する手型を指定します
- 手部操作の得点設定(手型を制限する場合)
手型を「左手/右手/両手」に設定した場合のみ、得点設定を行います:
- 操作成功得点: 指定された手型で正しく操作した場合の得点
- 操作失敗得点: 誤った手型で操作した場合の得点

- 設定の保存:【確認】ボタンをクリックして、すべての設定を保存し、現在のインタラクション編集ステップを終了します。
📌特別な説明:両手操作の挙動
- 手型を「両手」に設定した場合、システムは 両手同時でのモデル把持 を要求します
- 実際の操作時、左手がメインコントローラーとしてモデルの移動を担当します
- 右手はモデルにロックされ、単独では操作できません
- より厳密に両手協調の順序(例:左手で先に掴み、その後右手で補助)を判定したい場合は、「組み合わせ操作」機能を使用して実行順序を設定します。
💡 手部操作を評価対象とするステップでは、矢印やテキストによるガイドを併用して、受講者に操作要件を明確に伝えることを推奨します。
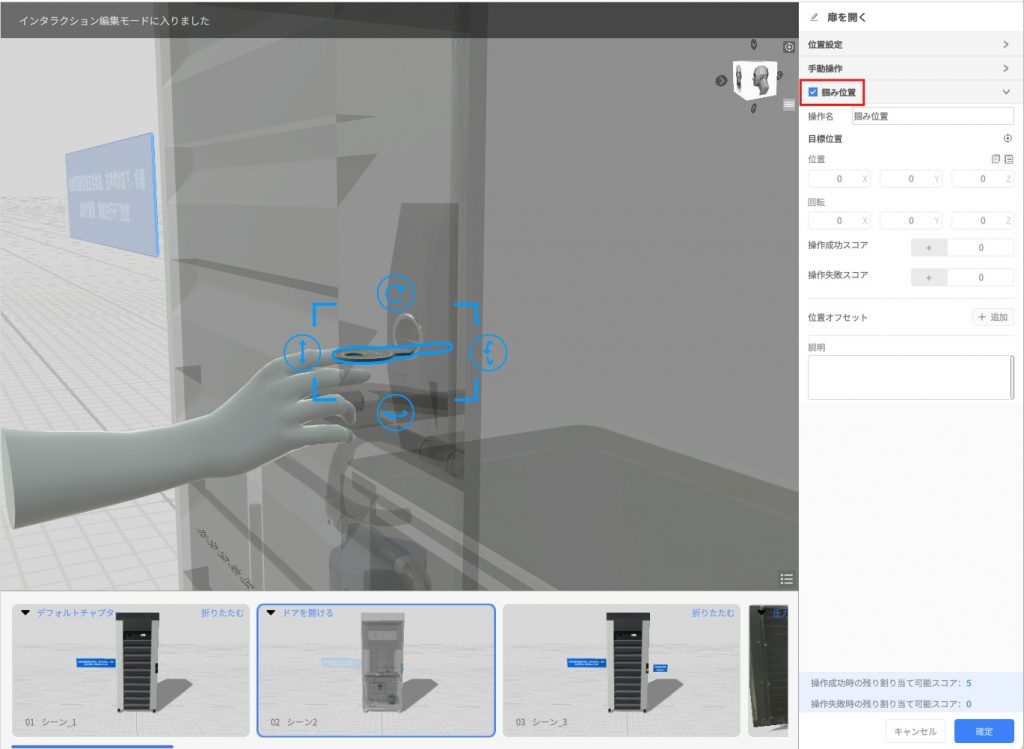
掴み位置の設定
抓掴み位置は、モデルを掴むことができる範囲(領域)とその採点ルールを定義するために使用します。
掴み位置の目標点および偏差計算は、「掴まれるオブジェクト(被操作モデル)」のローカル座標系を基準とします。
つまり、モデルの原点を基準として、掴み可能な領域と評価条件を定義します。
もし問題が「両手操作」に設定されている場合、左手と右手それぞれに対して個別に設定を行う必要があります。
ここでは例として「右手による掴み」を説明します。
操作手順
- インタラクション編集モードに入る。
- 掴み位置設定の有効化
「掴み位置」オプションをオンにすると、プロパティパネルに関連パラメータが表示され、シーン内には対応する**手のモデル(右手または左手)**が出現します。
マウスを対象モデルに近づけると、手のモデルがその表面に自動吸着します。
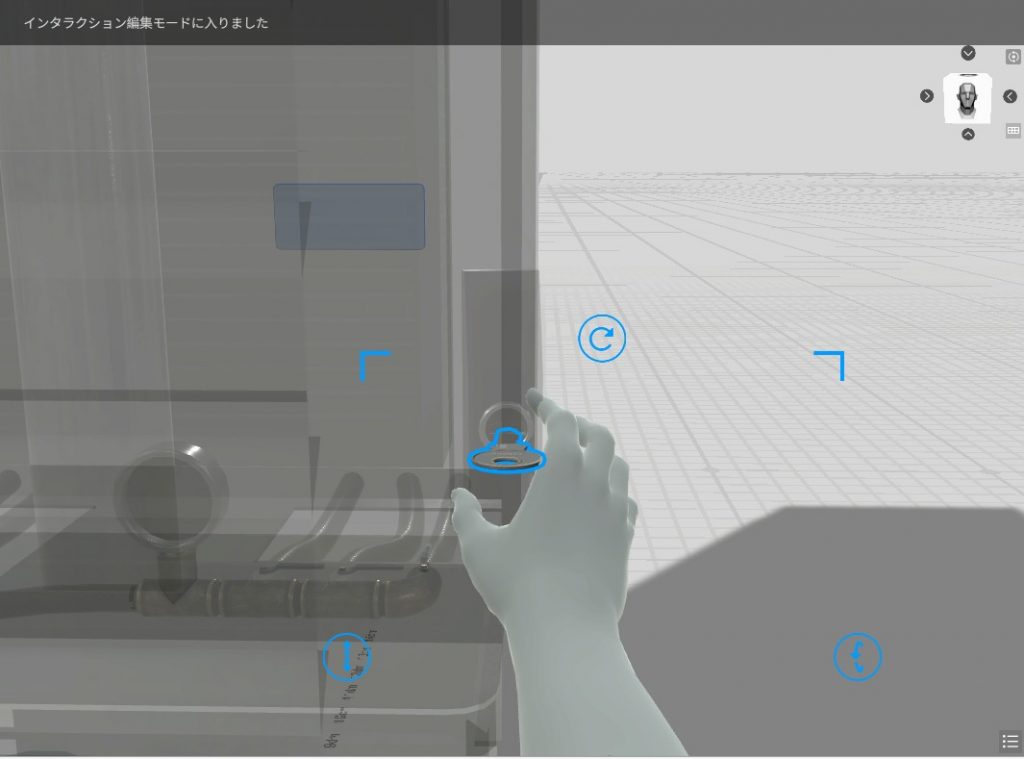
- 手のモデルの配置
- 手のモデルをダブルクリックすると、対象オブジェクトがピンクのアウトラインで表示され、編集不可の状態になります
- 手のモデルだけが青くハイライトされ、自由に移動・回転できます
- 調整が完了したら、シーンの空白部分をクリックして手のモデル編集モードを終了します。
- 掴み位置の微調整
- 手のモデルをダブルクリックすると、対象オブジェクトがピンクのアウトラインで表示され、編集不可の状態になります
- 手のモデルだけが青くハイライトされ、自由に移動・回転できます
- 調整が完了したら、シーンの空白部分をクリックして手のモデル編集モードを終了します
- 回転誤差角度の設定:手でモデルを掴む際に許容される回転角度の誤差(単位:°)を設定します。
この範囲内で掴めた場合、「成功した掴み」として判定されます。 - 掴み位置の得点設定(インタラクションIDがバインド済みの場合に設定可能)
- 操作成功得点: 目標掴み点と角度誤差範囲内で掴みが成功した場合に得られる得点;
- 操作失敗得点: 掴み位置や角度が不正確な場合に記録される得点。
- 掴み偏差量の設定(任意)
- 【+追加】ボタンをクリックして、偏差量(最大10件)を追加できます
- 各偏差には以下を設定します:
- 偏差値: 実際の掴み点と目標掴み点との距離
- 得点比率: その偏差範囲内で掴んだ場合の得点(成功得点に対する割合)
モデルが干渉オブジェクトの場合は得点比率の設定は不要で、該当項目は自動的にグレーアウトされます。
- 操作名の設定(任意):デフォルト名は「掴み位置」ですが、操作内容に合わせて識別しやすい名称に変更できます。
- 設定の保存:【確認】ボタンをクリックして掴み位置設定を保存します。インタラクション編集モードを終了すると、手のモデルはシーン上で自動的に非表示になります。
💡ヒント
- 手のモデルは編集段階のみ可視化され、One端での再生時には表示されません
- 掴み位置の偏差判定は、位置操作の偏差メカニズムと同様です。偏差範囲内であれば比率に応じて部分得点を取得し、最大偏差を超えると失敗として判定されます。
- 掴み位置を評価する問題では、矢印やテキストガイドを併用して受講者に掴みポイントを明示することで、誤操作を減らすことを推奨しま。
操作順序の設定
インタラクション操作において、1つのシーンに複数の操作ステップが含まれる場合、
操作の実行順序を設定することで、システムが採点時に受講者が想定どおりにタスクを完了したかを判断します。
- 有序実行(デフォルト)
システムは、操作リストの順序(例:1→2→3) に従って受講者の実行順を検証します。
- 指定された順序で完了した操作のみ得点が加算されます。
- 例:受講者が第1ステップを完了し、第2ステップを飛ばして第3ステップを実行した場合、第2ステップと第3ステップはどちらも得点されません。

- 無序実行
システムは操作の実行順序を検証せず、各操作が正しく行われれば得点を付与します。手順に自由度があるタスクや、手順の順番が結果に影響しない場合に適用されます。
組み合わせ操作の設定
組み合わせ操作は、両手で同時に協調して行うタスクに使用します。2つのインタラクション操作をペアとして結合し、システムはそれらを1つの統合操作として扱い、組み合わせルールに基づいて採点します。
使用シーン
左右の手で異なる2つの部品を掴み、それらを同時に持ち上げて移動し、指定エリアに配置して完了するタスク(順序設定も可能)。
設定手順
- シーン内で2つのインタラクション操作を作成し、それぞれの操作に 「左手」 と 「右手」 を設定、または両方とも「制限なし」に設定します。

- シーンのプロパティパネルで、2つの操作の前にあるチェックボックスをオンにしてから【バインド】ボタンをクリックします。

- (任意)実行順序を設定します。「先に掴む」「先に置く」のいずれかを選択します。

制限事項:
- 組み合わせは 2つのインタラクション操作のみ サポートしています
- 両方の操作は以下のいずれかの条件を満たす必要があります:
- 1つが【左手】、もう1つが【右手】
- 2つとも【制限なし】(左右手を区別しない)
採点ルール
システムは以下の条件に基づいて、組み合わせ操作が完了しているかどうかを判定します:
チェック項目 | 判定内容 |
両手とも掴み動作を完了しているか? | 両手で掴みが完了するまで「放す」操作は許可されません。 |
途中で先に掴んだ物体を離したか? | 1つ目を掴んだ後、もう1つを掴む前に放した場合は失敗となります。 |
左右手の優先順序を守っているか? | 「先に掴む/先に置く」が設定されている場合、その順序で操作を完了する必要があります。 |
他の操作との順序関係を守っているか? | 有序モードの場合、組み合わせ全体の順序も問題設定の手順に従う必要があります。 |
⚠️ 上記いずれかの条件を満たさない場合、組み合わせ操作は「失敗」と判定され、
システムは関連モデルをロックしてステップを終了します。
コースウェア内容の修正手順
コースウェア編集中に、問題内容の誤り、選択肢設定の不備、得点配分の不適切、問題の欠落や冗長などを発見した場合は、以下の手順で修正を行います。
- FactVerse プラットフォームにログインし、コースウェア管理から対象コースウェアの詳細ページへ移動。
- 【撤回】ボタン
 をクリックして公開済みコースウェアを取り下げます。
をクリックして公開済みコースウェアを取り下げます。
※ 受講者が学習中または試験中の場合は撤回できません。受講者が退出後に操作してください。
- コースウェア管理詳細ページで問題を修正(問題の追加・削除、内容変更、選択肢設定、得点設定など)。
- 【公開】ボタン
 をクリックして再公開します。
をクリックして再公開します。 - DataMesh Studio に戻り、コースウェアを再読み込みすると、問題およびシナリオ内容の編集を続行できます。
シナリオコースウェアのプレビュー
コースウェア編集画面上部のツールバーにある [再生] ボタン をクリックすると、シナリオコースウェアの再生プレビューモードに入ります。
システムは、現在のコースウェア内の問題に関連するシナリオチャプター内容を自動的に読み込み、講師が解答体験やインタラクション効果を事前に確認できるようにします。
コースウェアプレビュー画面
コースウェアプレビュー画面は、シナリオ再生ビューをベースに、問題関連機能エリアが追加されています。全体構成は以下の通りです。
- シーンページ:現在の問題に関連付けられたシナリオシーンのページ番号を表示します。
- 問題リスト:本コースウェア内の全問題を一覧表示し、現在再生中の問題はハイライト表示されます。
- 問題パネル:現在の問題の設問内容、選択肢情報、操作ボタンなどを表示します。

プレビューモードでは、学習の流れをシミュレーションし、問題のジャンプ、インタラクション設定、採点設定などの動作を確認できます。編集完了後は、早めにプレビュー検証を行うことを推奨します。
各問題タイプの操作説明
通常単一選択問題
(以下の項目では、単一選択問題の操作方法、回答、採点の流れを説明)

- 放棄:現在の問題をスキップし、次の問題へ進みます。
- 次の問題:ユーザーが回答を選択すると「次の問題」ボタンがアクティブになります。クリックすると、システムが正誤を判定してスコアを表示します。
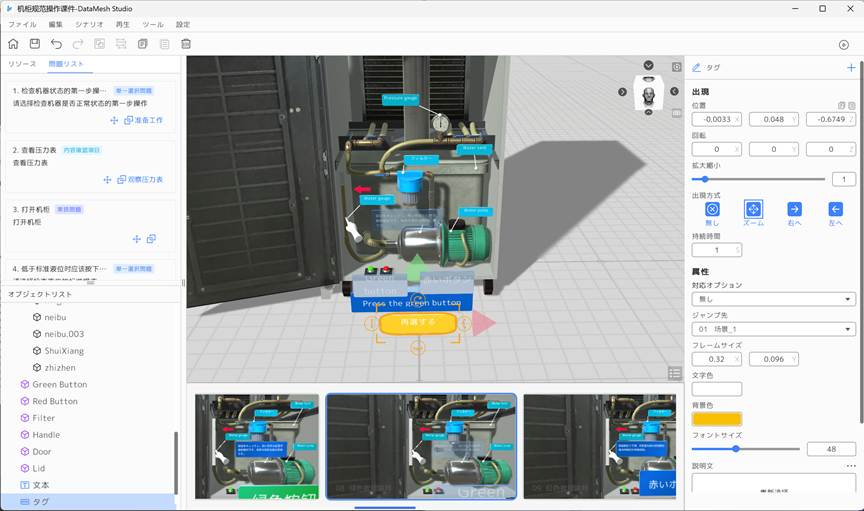
ジャンプ型単一選択問題
ジャンプ型問題では、各選択肢がシナリオ内のインタラクションオブジェクト(ボタン、モデルなど)に紐付けられます。問題パネルには選択肢テキストは表示されず、問題名と問題文のみが表示されます。
- 放棄:現在の問題をスキップし、直接次の問題へ進みます。
- 次の問題:ユーザーがシナリオ内のジャンプ用インタラクションオブジェクト(例:緑色のボタン)をクリックしてジャンプが実行されると、【次の問題】ボタンが有効化されます。クリックすると、システムは解答を判定し、得点を計算してページ上部に得点結果を表示します。
複数選択問題

- 放棄:現在の問題をスキップし、直接次の問題へ進みます。
- 次の問題:ユーザーが答えを選択すると、【次の問題】ボタンが有効化されます。クリックすると、システムは解答を判定して得点を計算し、再生画面上部にこの問題の得点を表示します。
内容確認項目

- 放棄:現在の問題をスキップし、次の問題へ進みます。
- 次の問題:所定の閲覧時間を満たすと「次の問題」ボタンがアクティブになります。クリックすると、スコアが画面上部に表示されます。
実操作問題

- 放棄:現在の問題をスキップし、次の問題へ進みます。
- リセット:シーン内のすべてのインタラクション操作をリセットし、初期状態に戻します。
- 完成:
- 画面右下のインタラクション操作リスト内のいずれかをクリックすると、操作効果をプレビューできます(表示のみで実操作は不可)。
- この状態で「完成」ボタンがアクティブになります。「完成」ボタンをクリックすると、現在の問題が完了したと見なされます。
- 「完成」後、システムはスコアを画面上部に表示し、自動的に次の問題に進みます。