ガイドブック
機能説明
ツインモデルテンプレートの作成
FactVerse Designer では、ユーザーは 2 つの方法 で ツインモデルテンプレート を作成でき、異なるニーズに対応可能 です。
ツインモデルテンプレートの作成
バーチャルファクトリーリソースパッケージには、工場内でよく使われる生成機、コンベヤー、AGV(無人搬送車)などの一般的なテンプレートが内蔵されています。ユーザーはこれらのプリセットテンプレートを選択し、具体的なニーズに応じて修正・編集することができます。この方法により、ツインモデルテンプレートの作成がシンプルかつ効率的になります。
例:カスタマイズされた一時保管エリアのテンプレート
この例では、バーチャル工場 リソースパッケージ 内の一時保管エリアのテンプレートを使用し、カスタマイズされた一時保管エリアのテンプレートを作成し、デフォルトの属性値を変更 します。
- ホーム画面の 【テンプレートを開く】 ボタンをクリックします。
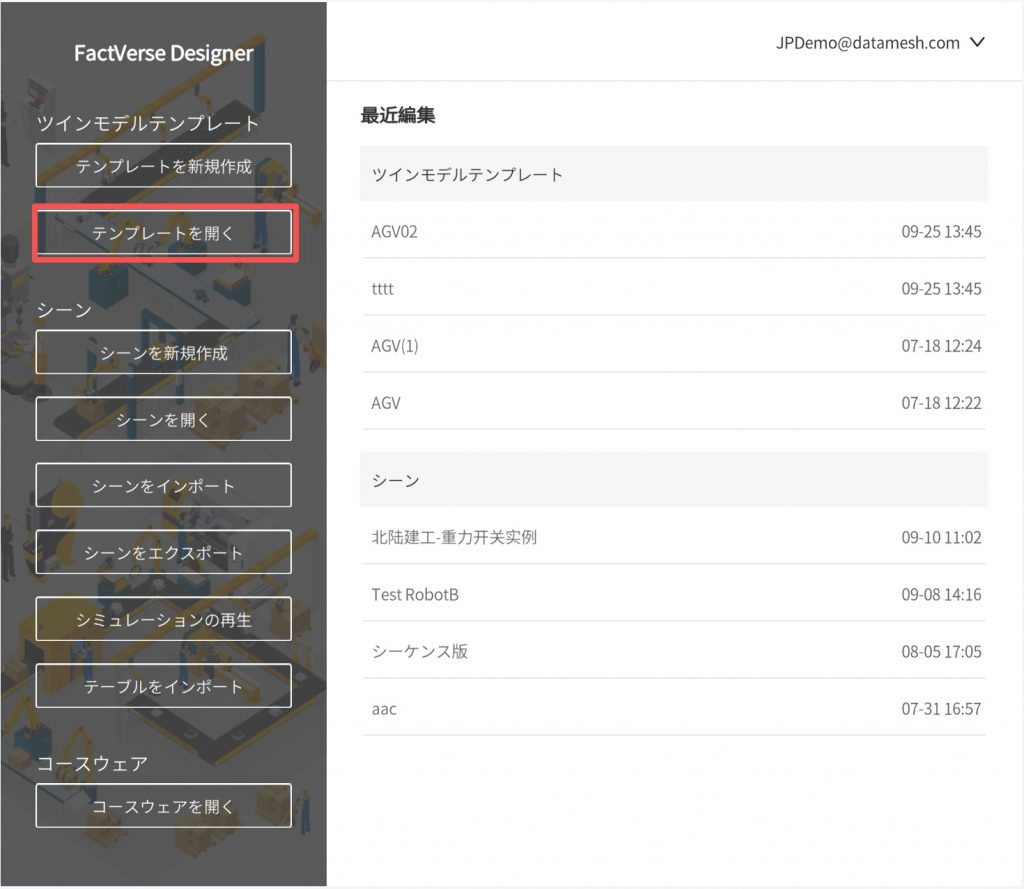
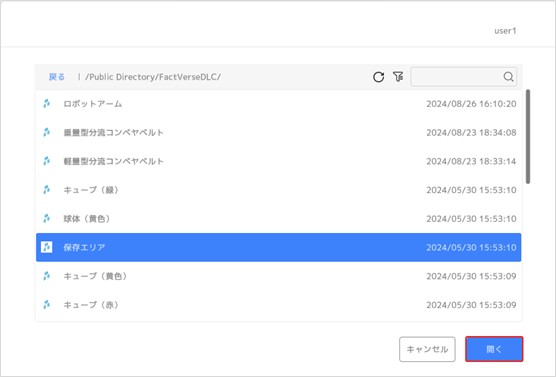
- テンプレート選択ウィンドウ で 「保管エリア」テンプレートを選択し、【開く】ボタン をクリックします。
- ツールバーの 【名前を付けて保存】ボタン
 をクリックし、保存ウィンドウを開きます。
をクリックし、保存ウィンドウを開きます。
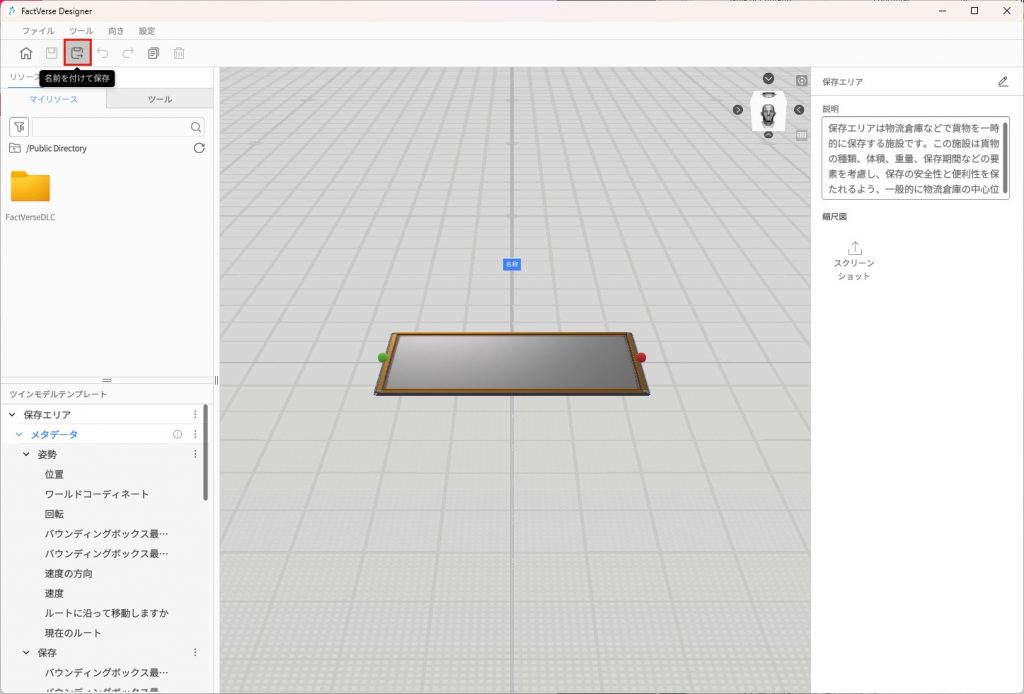
- 保存ウィンドウで保存先ディレクトリを選択 し、テンプレート名を指定 した後、【保存】ボタンをクリック して テンプレートを保存 します。

- ツインモデルテンプレートペインで「保存」構造内の「横幅」を選択します。右側のプロパティペインでデフォルト値を「2」に変更します。
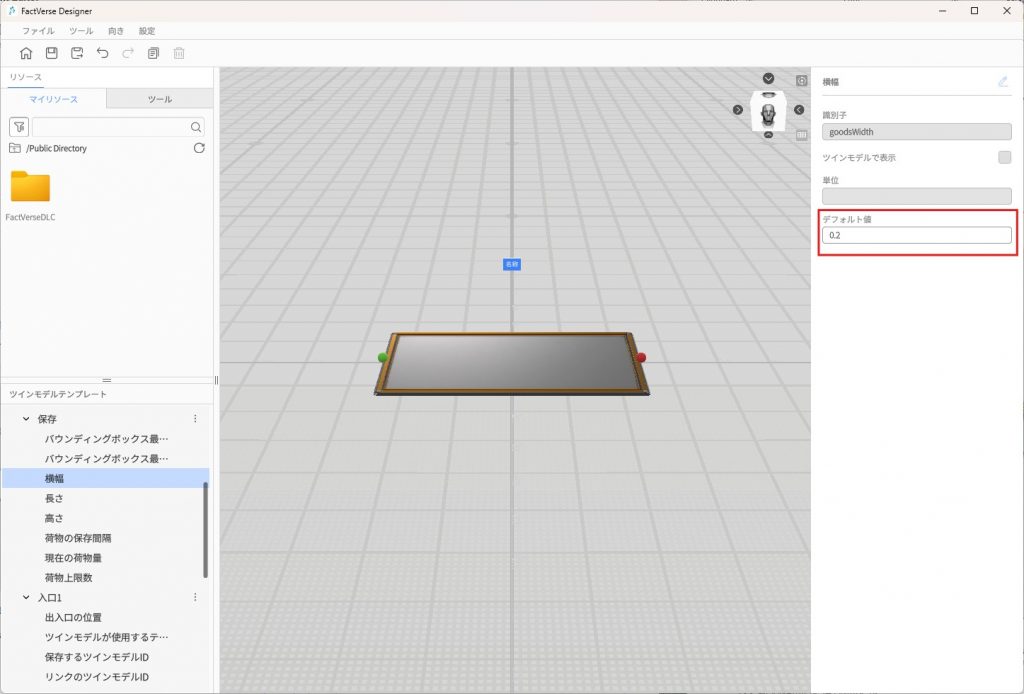
- 同様に「長さ」と「高さ」のデフォルト値も「2」に変更します。
- 【保存】ボタン
 をクリックし、テンプレートの保存を完了します。
をクリックし、テンプレートの保存を完了します。
新しいテンプレートの作成
ゼロから完全にカスタマイズしたツインモデルテンプレートを作成し、特定のシーン要件に対応できます。本例では「色が変化するキューブ」を作成し、異なる信号値を受信した際に自動で色が切り替わるようにします.
サンプルの目標
実装ロジック:属性「信号」の値が 1~4 の場合、キューブの色をそれぞれ 青・緑・赤・シアン に変化させます。
1. 立方体テンプレートの作成:
a) ホーム画面で【テンプレートを新規作成】をクリックし、テンプレートエディターを開きます。
b) 左側のリソースライブラリで「立方体」をクリックして配置モードに入り、シーンエリアにキューブを配置します。
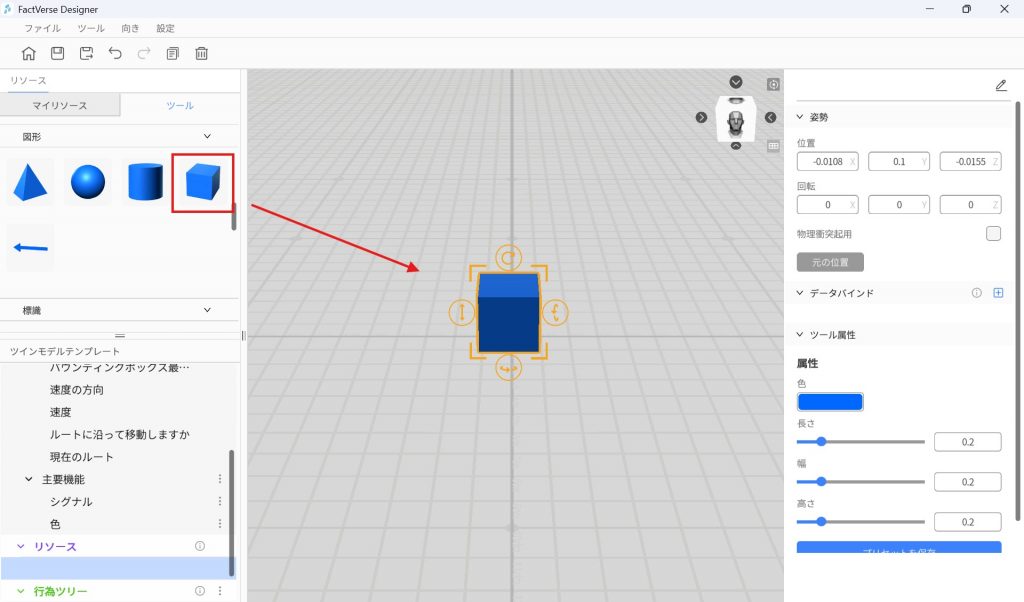
c) 配置完了後、右クリックで配置モードを終了します。
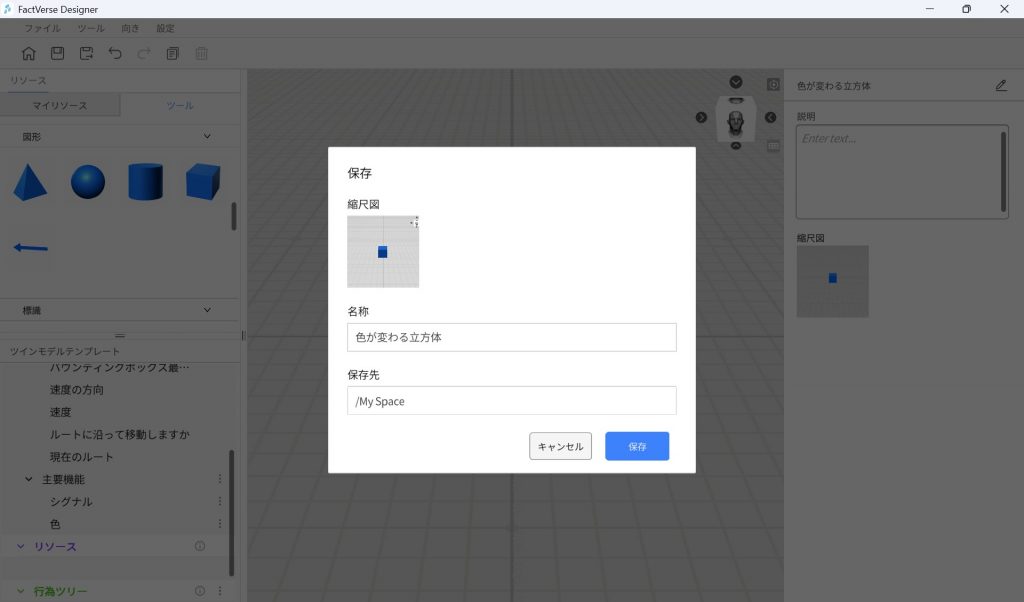
d) ツールバーの保存ボタン![]() をクリックし、テンプレート名を「色が変化するキューブ」として保存します。
をクリックし、テンプレート名を「色が変化するキューブ」として保存します。
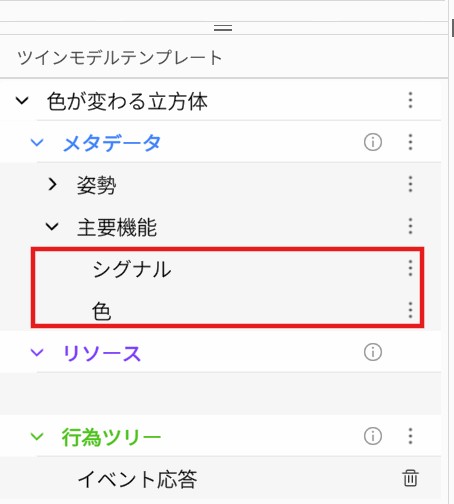
2. 主機能構造の追加:
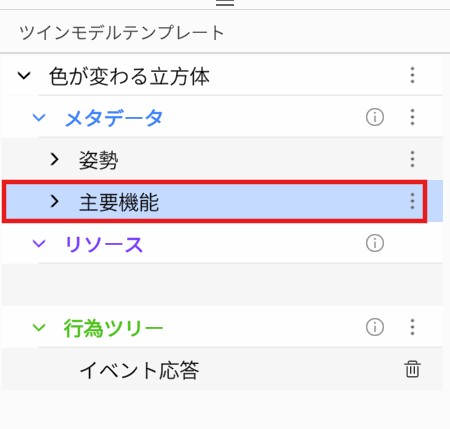
a) ツインモデルパネルで、メタデータの横の︙をクリックし、「構造を追加」を選択します。
b) スクロールバーを使って新しく追加された「Part_1」を見つけ、属性パネルで「主要機能」と名前を変更します。
c) 「主要機能」構造の下に「色 (Color)」と「シグナル (Int)」 の 2 つのプロパティを追加します。
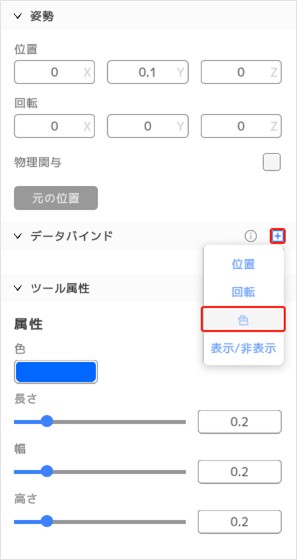
3. 色属性のデータバインド
a) シーンエリアで立方体モデルを選択します。
b) 右側のプロパティパネル で、データバインドの【追加】ボタン![]() をクリックし、属性リストから「色」属性を選択します。
をクリックし、属性リストから「色」属性を選択します。
c) 色プロパティのバインドウィンドウ で、![]() ボタンをクリックし、「主機能」構造の「色」プロパティを選択します。
ボタンをクリックし、「主機能」構造の「色」プロパティを選択します。
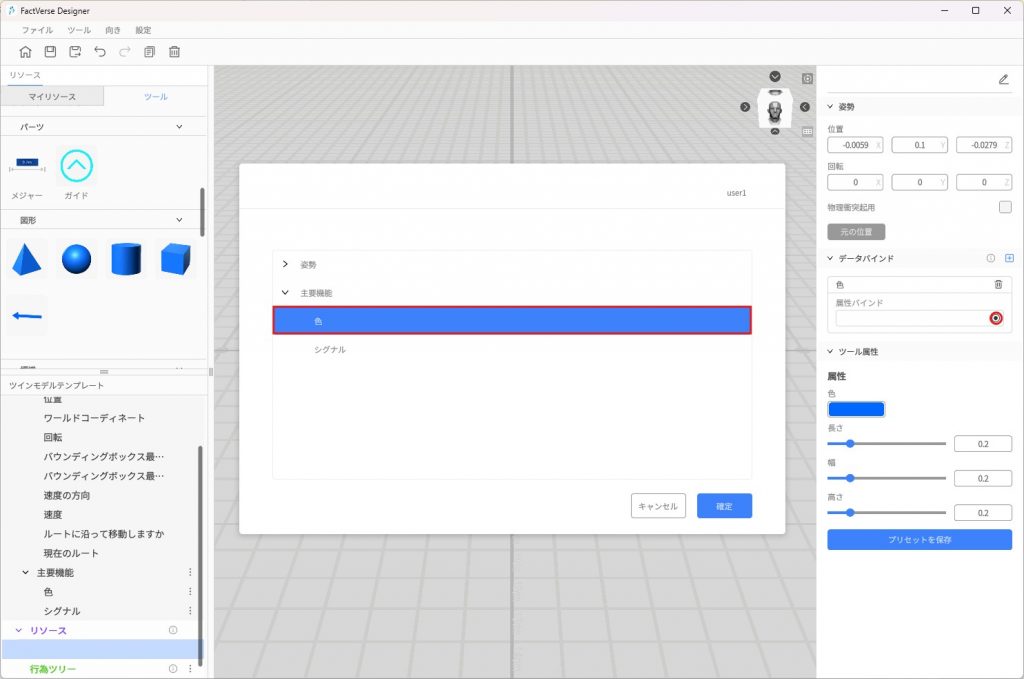
d) 【確定】ボタンをクリックし、データバインドを完了します。
説明:この手順により、ツインモデルの属性「色」がモデルの色変化を制御できるようになります。
4. 行為ツリーの作成(信号値に応じた色変更)
a) ツインモデルテンプレートパネルで、行為ツリーセクションの ︙ をクリックし、【行為ツリー作成】を選択します。
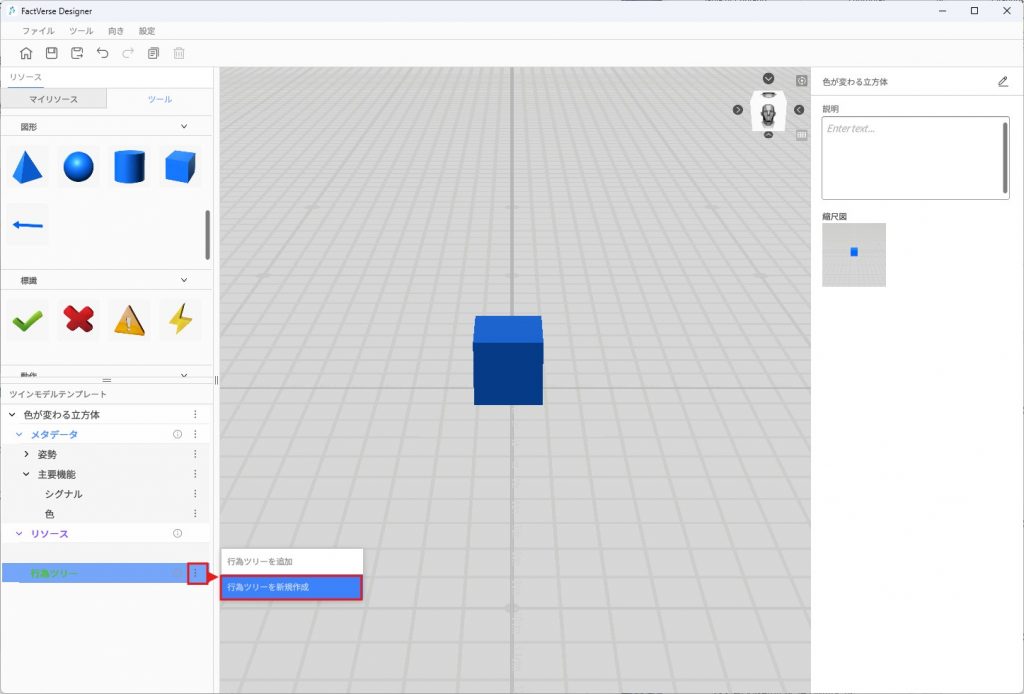
b) 行為ツリーを「信号変化を監視」として保存します。
5. 行為ツリーの編集
a) 「信号変化を監視」行為ツリーをダブルクリックし、行為ツリーエディターを開きます。
b) ルートノードの下に「選択ノード」を追加します。
c) 選択中のノードの下に順次 4 つの【シーケンスノード】を追加し、それぞれのシーケンスノードに「2つのツインモデルの属性値を比較する」条件を設定します。
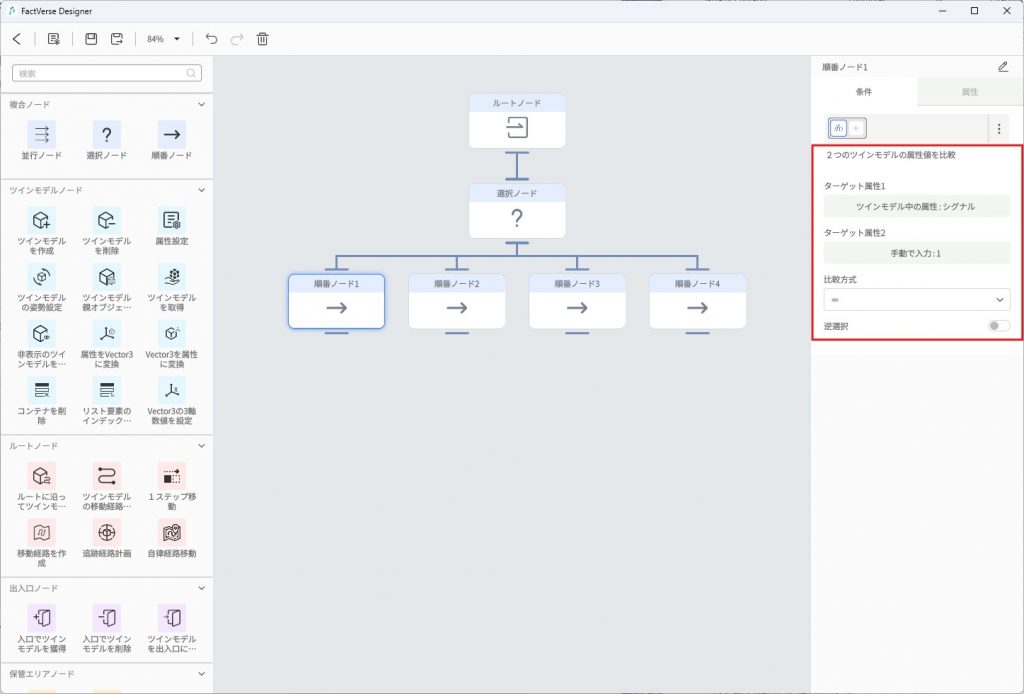
条件ノード設定(「2つのツインモデルの属性値を比較」)
シーケンスノード名 | 対象属性1 | 信号値(対象属性2) | 比較条件 |
シーケンスノード1 | ツインモデルの属性:信号 | 1 | 等しい |
シーケンスノード2 | ツインモデルの属性:信号 | 2 | 等しい |
シーケンスノード3 | ツインモデルの属性:信号 | 3 | 等しい |
シーケンスノード4 | ツインモデルの属性:信号 | 4 | 等しい |
説明:各シーケンスノードは 1つの判定+実行ロジックを表します。すなわち「信号値が X の場合、色を Y に設定する」という処理です。
d) 各シーケンスノードの下に【属性設定ノード】を追加し、色を変更できるようにします。
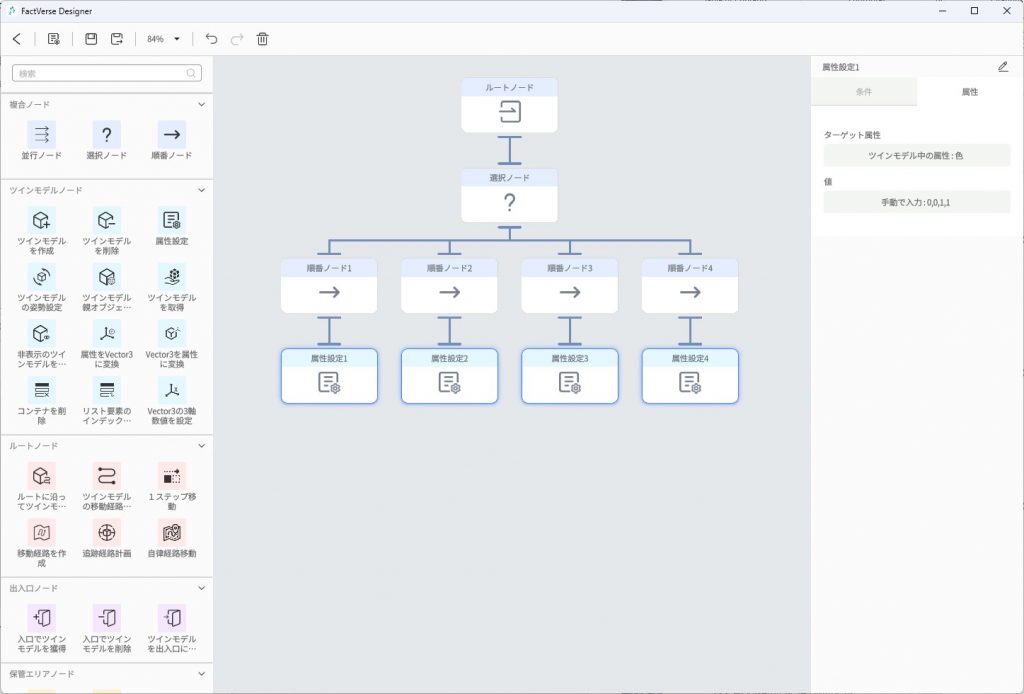
属性設定ノードの構成
属性設定ノード名 | 対象属性 | 属性値(RGBA) | 説明 |
属性設定1 | ツインモデルの属性:色 | 0,0,1,1 | 青 |
属性設定2 | ツインモデルの属性:色 | 0,1,0,1 | 緑 |
属性設定3 | ツインモデルの属性:色 | 1,0,0,1 | 赤 |
属性設定4 | ツインモデルの属性:色 | 0,1,1,1 | シアン |
6. 行為ツリーを保存する:
a) ツールバーの保存ボタンをクリックして、行為ツリーを保存します。
b)「<」をクリックして、行為ツリーエディターを終了します。
7. テンプレートを保存する:ツールバーの保存ボタンをクリックして、テンプレートを保存します。
8. テンプレートエディターを終了する:ホームボタンをクリックして、テンプレートエディターを終了し、テンプレートの編集を完了します。
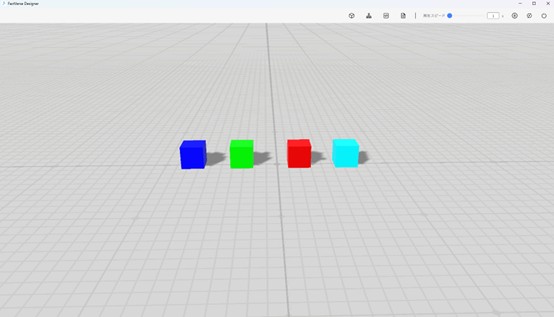
上記の手順を実行することで、シグナル値の変化によって色が変わるキューブのツインモデルテンプレートを作成できます。このテンプレートを使用してキューブを作成し、その「シグナル」プロパティの値を設定すると、キューブの色の変化を観察できます。
ツインモデル管理
ツインモデルの作成
FactVerse Designer では、3つの方法でツインモデルを作成・管理でき、柔軟に構築・一括構成・シーン全体のインポートを行うことができます。利用目的に応じて使い分けが可能です。
作成方法 | 適用シーン |
手動作成 | 少数のツインモデルを迅速に追加、部分的な調整 |
テンプレートExcel表のインポート | 1つのテンプレート配下で複数のツインモデルを一括追加/編集 |
シーンExcel表のインポート | シーン全体の構造を一括復元、移行や全体管理に対応 |
ツインモデルの手動作成
操作手順
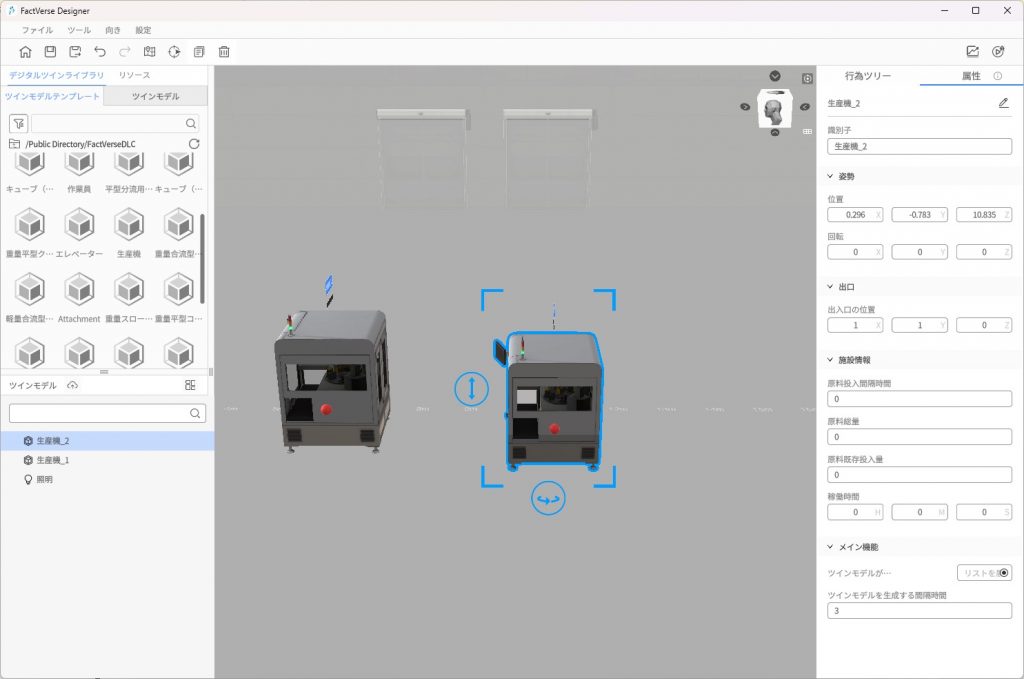
- デジタルツインライブラリ > 「ツインモデルテンプレート」タブで対象テンプレートをクリックし、配置モードに入ります。
- システムがテンプレートを読み込むと、緑色のアウトライン付きのプレビューモデルが表示されます。
- シーンエリアを左クリックして配置位置を確定します。
- 配置が完了すると、新しいツインモデルが自動生成され、名称規則は「テンプレート名_番号」となります。
入テンプレートExcel表のインポート
同一テンプレート配下で複数のツインモデルを一括作成またはメンテナンスする場合に適しています。
機能概要
- 空のテンプレート構造をエクスポート、またはインスタンスデータを含むテンプレートファイルをエクスポート可能
- Excel 表でツインモデルの新規追加・編集・削除をサポート
- 属性・位置など各種設定項目を完全に編集可能
- 表をインポートすると、プラットフォームが自動的に関連ツインモデルを生成または更新
操作手順
1. テンプレートを開く:ホーム画面で【テンプレートを開く】をクリックし、バッチ作成に利用するツインモデルテンプレートを選択して開きます
2. 表のエクスポート:
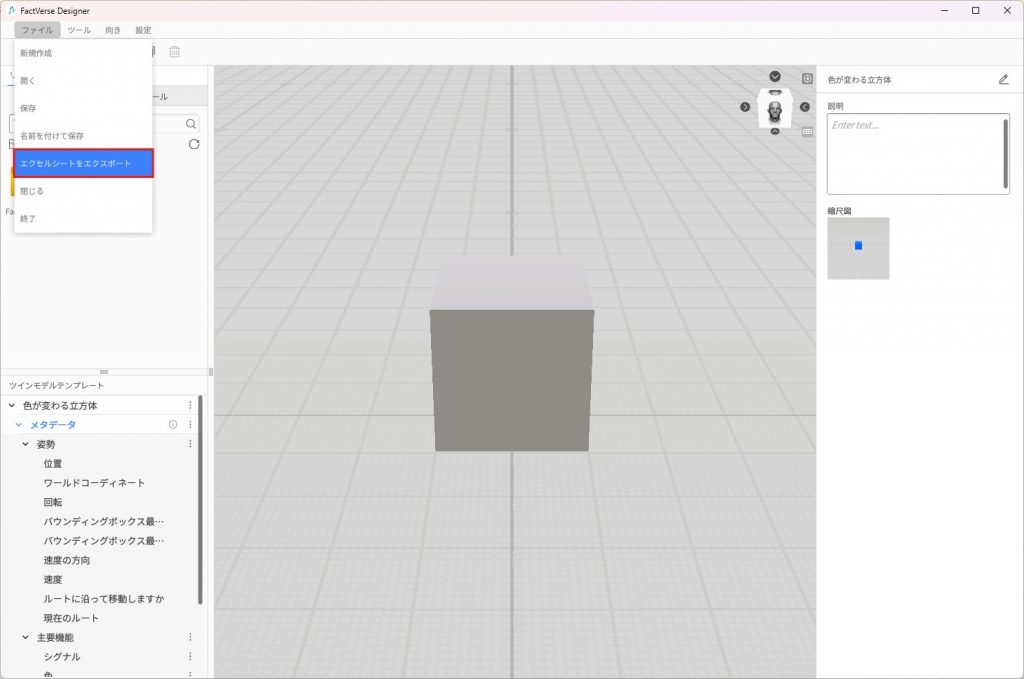
a) テンプレートエディターのメニューバーで【ファイル】 > 【表としてエクスポート】を順にクリックします。
b) 表示されたウィンドウで、エクスポート内容を選択します。
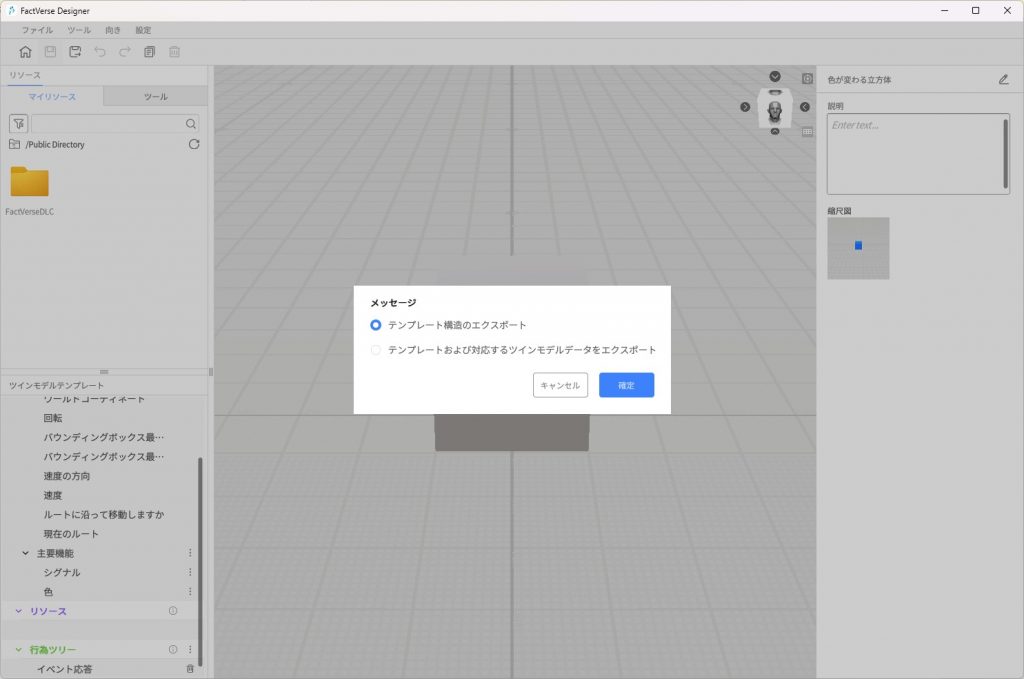
- テンプレート構造をエクスポート(デフォルト):テンプレート項目の定義のみを含む軽量表。インスタンスデータは含みません。
- テンプレートと関連ツインモデルデータをエクスポート:テンプレート構造と全関連ツインモデルのインスタンスデータを含む完全な表。バッチ修正や新規追加に利用可能。
c) 【確認】をクリックし、Excel ファイルをローカルに保存します。
3. Excel 表の編集:
エクスポートした Excel 表でツインモデルデータを編集または新規追加します。
表の構造仕様:
- 各行は1つのツインモデルを表します。
- ツインモデルID:
- 既存ツインモデルの ID を入力すると、そのデータが更新されます。
- 空欄の場合、インポート時に新しいツインモデルオブジェクトが自動作成されます。
フィールド仕様:
項目 | データ型 | フォーマット | 例 |
ツインモデルID | 文字列 | ツインモデルの一意識別子 | 12345-abcde |
ツインモデル名 | 文字列 | 任意の名称 | 赤いキューブ1 |
識別子 | 文字列 | 任意の識別コード | abcde-67890 |
ストレージパス | 文字列 | ツインモデルの保存パス | /My Space |
親オブジェクトID | 文字列 | 関連付ける親ツインモデルのID、無い場合は空欄 | 12345 |
姿勢位置 | vector3 | 3次元座標、シーン内の位置 | 1.0, 2.5, 0.0 |
注意:
- 既存ツインモデルを更新する場合は、ID フィールドの入力が必須です。
- 新規作成する場合、ツインモデルIDは空欄のままで構いません。
- インポート前に編集済みの表を閉じておいてください。
詳細は《FactVerse プラットフォームユーザーマニュアル》の「属性のデータ型」を参照してください。
4. 表のインポート:
a) ホームボタン![]() をクリックし、ホーム画面に戻ります。
をクリックし、ホーム画面に戻ります。
b) ホーム画面で【テーブルをインポート】をクリックします。
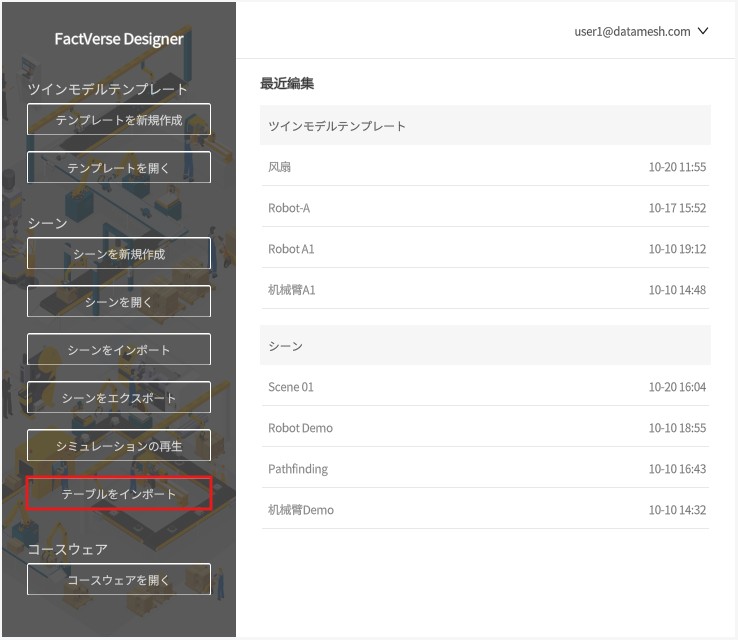
c) 編集済みの Excel ファイルをアップロードすると、システムが自動で関連ツインモデルを生成または更新します。
シーンExcel表のインポート
シーン全体の構造をエクスポート/インポートする場合に適しており、複数のテンプレートおよびその配下のすべてのツインモデルを含みます。
機能概要
- 複数テンプレートに属するツインモデルを集中編集可能
- シーン全体の構造を迅速に復元可能
- ツインプロジェクトの移行や属性の一括設定に活用可能
表構造の仕様:
ワークシート | 内容説明 |
Rules | 記入方法およびフォーマット要件 |
Scene_シーン名 | 現在のシーンで使用されるテンプレート情報の一覧 |
Template_テンプレート名 | 各テンプレート配下のすべてのツインモデル設定(テンプレートごとに1シート) |
注意:ツインモデルがプライベートツインモデルの場合、【ストレージパス】フィールドは空欄になります。
操作手順
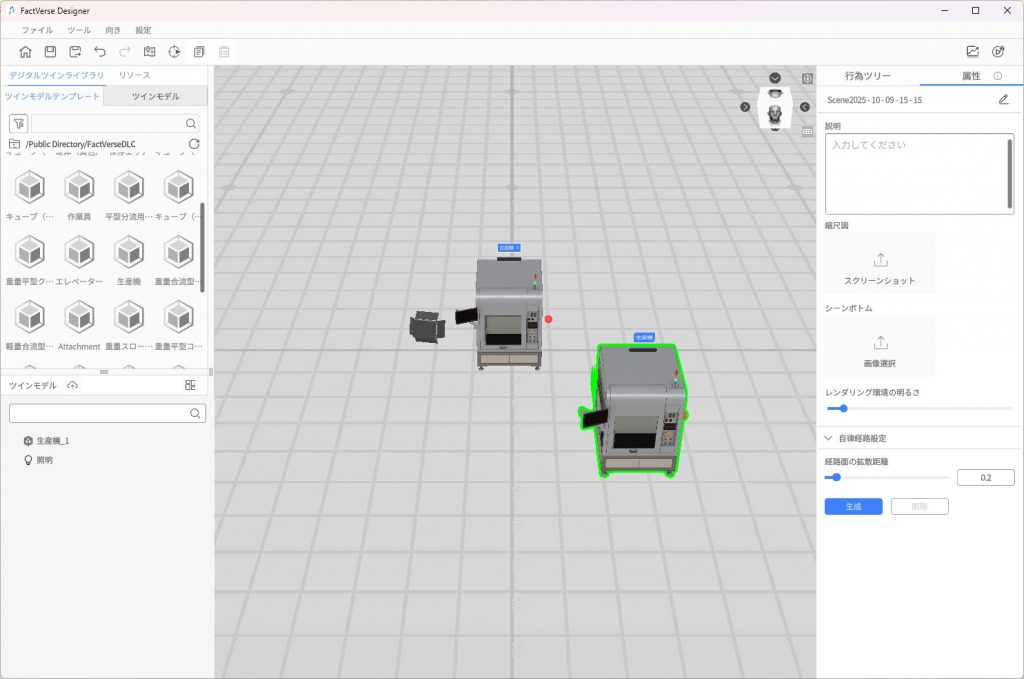
- 対象シーンを開く。
- シーンをExcel表としてエクスポート:メニューバーで【ファイル】 > 【エクセルシートをエクスポート】をクリックし、シーンをExcel表に出力します。。
- Excel表を編集:任意のテンプレート配下のツインモデルの属性や位置を追加・変更可能です。編集完了後は保存して表を閉じます。
- Excel表をインポート:Designer ホーム画面で【テーブルをインポート】をクリックすると、システムが自動的にシーン構造とツインモデルの作成・更新を行います。
公開ツインモデルとしてマークする
デフォルトでは、新規作成したツインモデルはプライベートツインモデルとして扱われ、現在のシーン内のみに存在し、プラットフォームの不可視パスに保存されます。他のユーザーが閲覧・再利用することはできません。
リソース共有やシーン間での再利用を実現するため、ツインモデルを公開ツインモデルとしてマークし、クラウドディレクトリにアップロードできます。当該ツインモデルがいずれのシーンにも参照されていない場合、アクセス権を持つユーザーは「ツインモデル一覧」でその公開ツインモデルを確認・利用できます。
操作手順
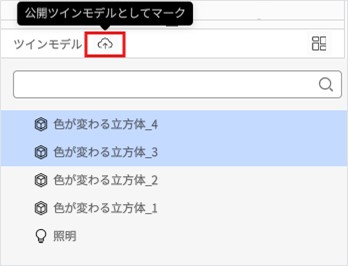
- シーン内で1つ以上のツインモデルを選択します。
- 【公開ツインモデルとしてマーク】ボタンをクリックすると、公開ツインモデル設定ウィンドウが表示されます。
- 表示されたウィンドウで公開対象のツインモデルをチェックします。
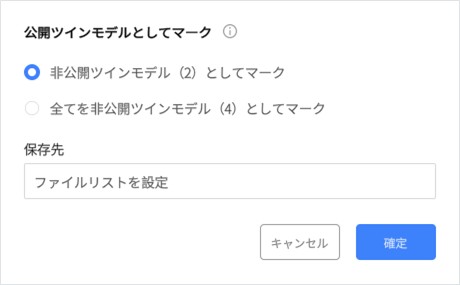
オプション | 説明 |
選択したプライベートツインモデルをマーク (X) | 現在選択中のオブジェクトのうち、プライベートツインモデルのみを公開としてアップロードします。選択対象に非プライベートツインモデルや他のリソースが含まれる場合は自動的にフィルタリングされ、プライベートツインモデルのみが処理されます。X は選択されたプライベートツインモデルの数を表します。 |
すべてのプライベートツインモデルをマーク (X) | 現在のシーン内に存在するすべてのプライベートツインモデルを一括して公開にマークします。X はシーン内のプライベートツインモデルの総数です。 |
- 【確認】をクリックすると:
- マークされたツインモデルのアイコンが灰色から青
 に変わります。
に変わります。 - この時点では「予備マーク」状態であり、まだクラウドディレクトリにはアップロードされません
- シーンを保存:
- すべての「予備マーク」されたツインモデルがクラウドディレクトリにアップロードされます。
- アップロード完了後、権限を持つ他のユーザーがクラウドディレクトリで閲覧・利用可能となります。
取り消し操作について
- シーンを保存する前であれば、予備マーク状態を取り消すことが可能です。
- 保存後であっても、取り消し操作で公開状態を解除できますが、再度シーンを保存することで有効となります。
ツインモデルの削除
FactVerse Designer におけるツインモデルの削除結果は、そのツインモデルが「シーン内にのみ存在するプライベートツインモデル」か、「クラウドにアップロード済みの公開ツインモデル」かによって異なります。
操作手順
- 削除操作の実行:
対象ツインモデルを選択し、Delete キーを押すか、右クリックメニューの【削除】をクリックします。
誤って削除した場合は、ツールバーの【元に戻す】で復元可能です。
- 削除結果:
ツインモデル種別 | 削除結果 |
プライベートツインモデル | 属性や行為ロジックを含め完全に削除されます。操作は即時反映されます。 |
公開ツインモデル | シーン内の参照関係のみ削除されます。当該ツインモデルインスタンスはクラウドリソースディレクトリに保持されます。 |
- シーンを保存すると削除が確定します。
💡 注意:
- ツインモデルは1つのシーンからのみ参照できます。削除は参照の解除を意味します.
- シーン内で「公開ツインモデル」を削除しても、クラウド上の実体は削除されません。クラウドから完全に削除するには、当該ツインモデルがどのシーンからも参照されていない状態にする必要があります。
ツインモデルのリネーム
FactVerse Designer では、シーン内のツインモデルに対して命名またはリネームを行うことができます。
リネーム可能なツインモデル:
- クラウドディレクトリから参照された公開ツインモデル
- テンプレートから新規作成されたプライベートツインモデル
リネーム不可のオブジェクト:
- FactVerse リソースパッケージのプリセットツインモデル
操作手順
1. シーン内で対象ツインモデルを選択します。
2. 右側の「属性」パネルで、ツインモデル名の横にある【編集】アイコンをクリックします。

3. 新しい名称を入力し、Enter キーまたはシーン空白部分をクリックして確定します。
4. ツールバーの【保存】ボタンをクリックし、シーンを保存すると変更が反映されます。
カスタム小ツール
調整済みの小ツールをカスタムプリセットとして保存することで、後続のシーン構築やツインモデルテンプレート編集において素早く再利用できます。すべてのカスタム小ツールは リソースライブラリ > ツール > カスタム エリアに表示されます。
カスタム小ツールの追加
操作手順
1. リソースライブラリ > ツール パネルで任意の小ツールを選択し、シーンエリアに配置します。
2. 必要に応じて属性パラメータを調整します。
3. 調整完了後、属性パネルの【プリセットを保存】ボタンをクリックします。
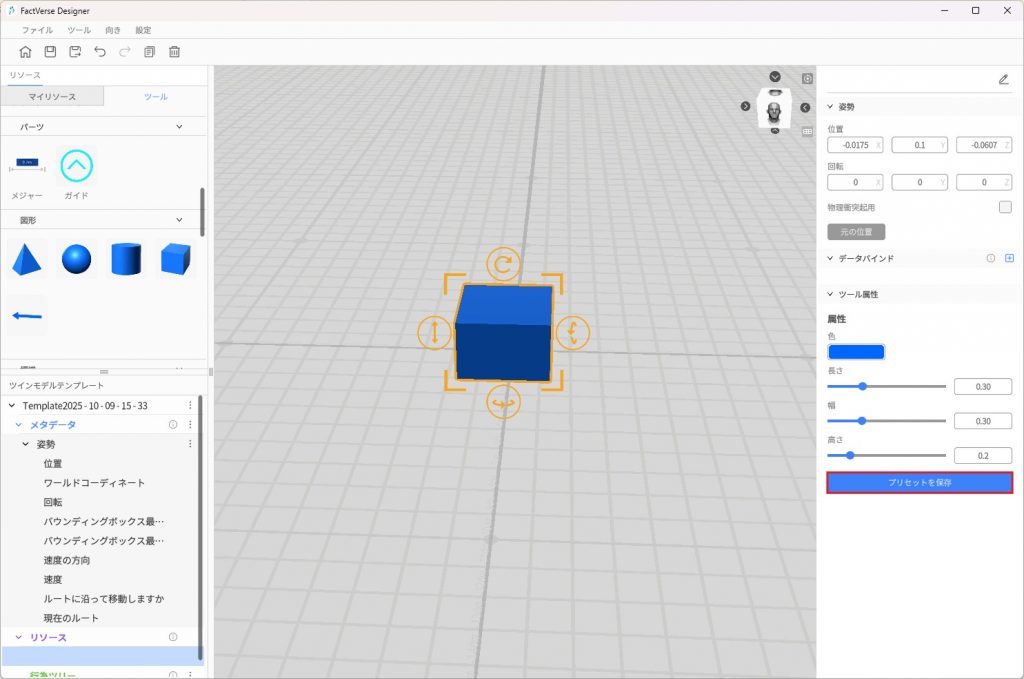
4. 表示される命名ウィンドウに名前を入力し、【確認】をクリックします。
5. 小ツールはカスタムプリセットとして リソースライブラリ > ツール > カスタム エリアに表示され、アイコンは元の小ツールと同一です。

カスタム小ツールの編集と管理
既存設定の更新:
- リソースライブラリからカスタム小ツールを選択し、シーンエリアに配置します。
- 必要に応じて属性パラメータを調整します。
- 【プリセットを保存】ボタンをクリックします。
- 表示された命名ウィンドウに、既存のプリセットと同じ名前を入力します。
- システムの確認ウィンドウで【確認】をクリックすると、既存プリセットが上書きされます。
カスタム小ツールのリネームまたは削除:
- リソースライブラリ > ツール > カスタム エリアで対象小ツールを右クリックし、操作メニューを表示します。

- 【リネーム】または【削除】を選択して管理操作を行います。
パスモード
パスモードは、デジタルツインシーンにおいてツインモデルに移動軌跡を指定するための機能です。シーン内にキーポイントとその連結関係を設定することで、有向グラフを構築し、ツインモデルが移動できる範囲と方向を制約します。
パスモードはシーン全体に適用され、構築されたパスグラフは複数のツインモデルで共有可能です。これにより、AGVの走行やロボットの巡回などのシーン動作を実現できます。
主な概念
概念 | 説明 |
キーポイント | シーン内に作成されるパス頂点、位置ノードを表す |
連結関係 | キーポイント同士の接続関係。接続方向(単方向/双方向)を設定可能 |
パス | 一連の連続したキーポイントで構成され、ツインモデルが順に移動する経路 |
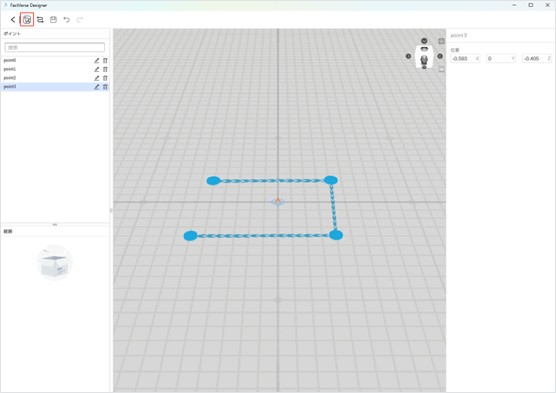
構築モード
「構築モード」は、シーン内に新規のパスキーポイントを追加し、連結関係を定義する際に使用します。
操作手順
- パスモードに入り、ツールバーの【構築】ボタン
 をクリックします。
をクリックします。 - シーン内の任意位置をクリックして最初の点を追加し、マウスを移動して再度クリックすると、2つ目の点が追加され、自動的に接続線が生成されます。
- さらにキーポイントを追加すると、システムは設定済みのデフォルト方向で各点を自動的に接続します。
構築設定
シーン左上でデフォルト構築パラメータを設定し、効率的にパスを構築できます:
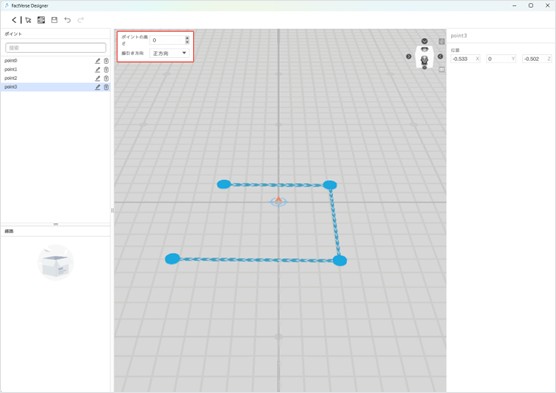
パラメータ | 説明 |
点の高さ | 新規追加される点のデフォルト高さ(Z軸) |
接続方向 | 点同士の接続方向を設定(順方向/逆方向/双方向) |
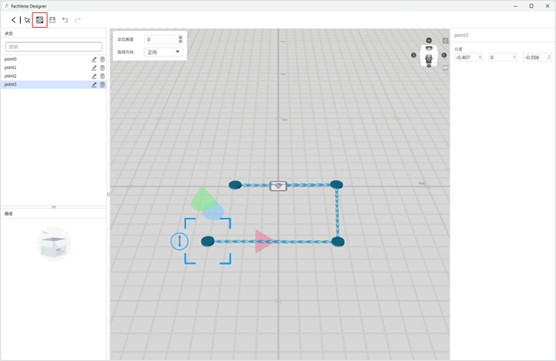
選択モード
「選択モード」は、既存の点や全体視点を調整するために使用し、新しいパスポイントは作成されません。
操作説明:
- 視点の調整:マウスドラッグでシーンの視点を回転または移動
- キーポイント位置の編集:既存のキーポイントをクリックし、移動または右側パネルで座標を変更
- 接続方向の編集:2つのキーポイント間の接続線を選択し、右側属性パネルの「方向アイコン」をクリックして、順方向/逆方向/双方向を切り替え
パス作成の基本プロセス
- シーン編集画面でツールバーの【経路モード】
 をクリックし、パスモードに入ります。
をクリックし、パスモードに入ります。 - 「構築モード」に切り替え、必要に応じてシーン上にキーポイントを追加します。
- システムはデフォルト設定に従ってキーポイントを自動的に接続し、接続線を生成します。
- 「選択モード」に切り替え、キーポイント/接続線を選択して位置や方向を調整します。
- 選択モードでは、点や接続線をクリックして位置や接続方向を修正できます。
後続の行為ツリーでパスノードを組み合わせることで、ツインモデルの動作をパスグラフに紐付け、複雑な移動制御を実現できます。
シーンのインポートとエクスポート
デジタルツインシーンファイル(拡張子 .digpkg)には、シーン内のツインモデルやその他のデジタルツイン関連コンテンツが含まれます。例:ツインテンプレートのメタデータ、行為ツリー、リソース、シーンのパスなど。
ユーザーはホーム画面でデジタルツインシーンのインポートおよびエクスポートを選択できます。

ロケーション編集
デジタルツインシーンを作成する際、FactVerse Designer はデフォルトでシーンの (0, 0, 0) 位置にロケーションコードを生成します。ユーザーは DataMesh One でシーンを再生する際、このロケーションコードをスキャンすることで、デジタルツインシーンを物理環境のターゲット位置に正確に配置できます。
FactVerse Designer では、ロケーション編集機能を提供しており、ユーザーは以下の操作が可能です:
- ロケーションコードの変更・追加・削除
- リファレンスモデル(参照モデル)を使用してシーン編集を補助
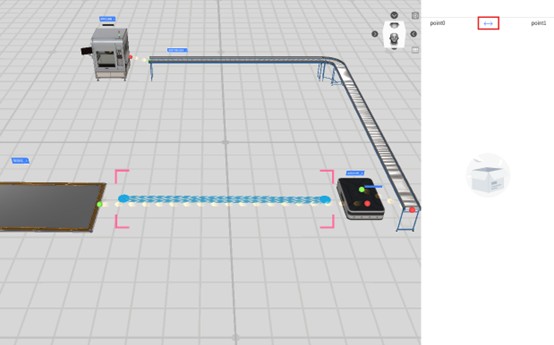
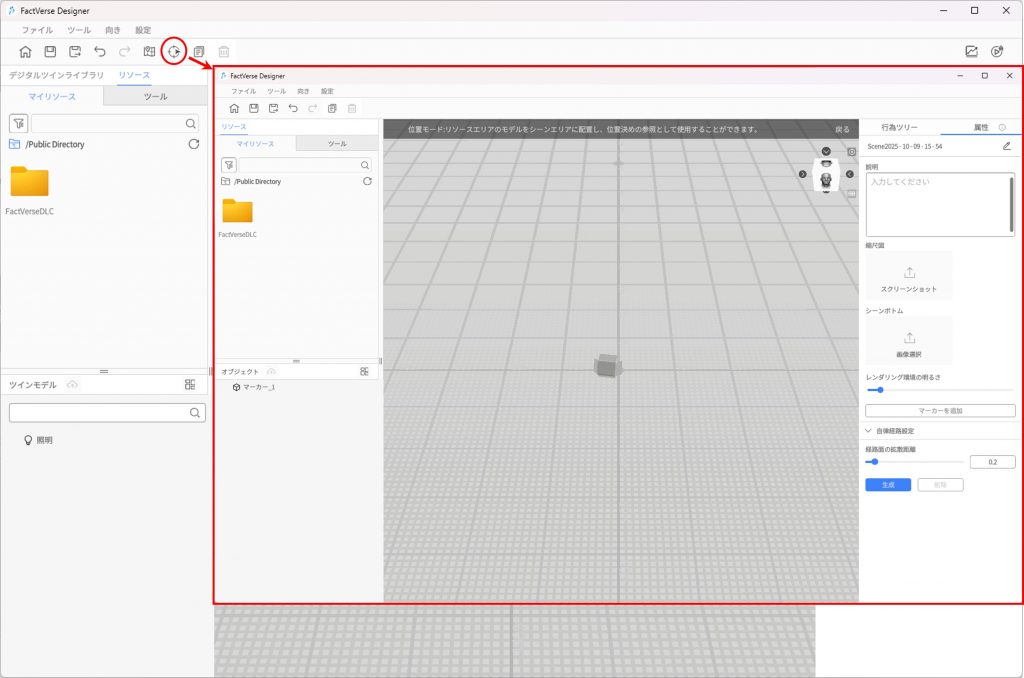
マーカーの編集
シーンエディターでツールバーの【位置モード】ボタン![]() をクリックすると、ロケーション編集モードに入ります。
をクリックすると、ロケーション編集モードに入ります。
マーカーの編集:位置モードのキャラクターリスト(現在のシーンに含まれるすべてのマーカーと参照モデルの一覧)でマーカーを選択すると、属性パネルに当該マーカーの詳細情報が表示されます。
- 位置:位置パラメータを修正することで、マーカーの三次元空間上の位置を正確に調整できます。
- 回転角度(Y):マーカーのY軸回転角度を編集可能です。
- クイック方向設定:属性パネルからマーカーの方向(水平または垂直)を素早く設定できます。
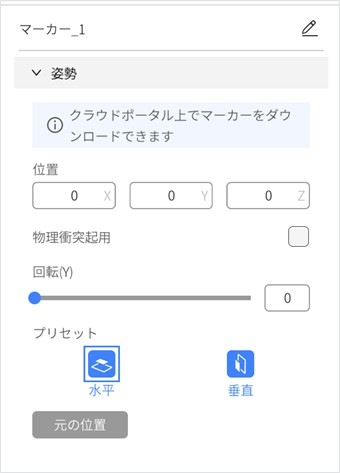
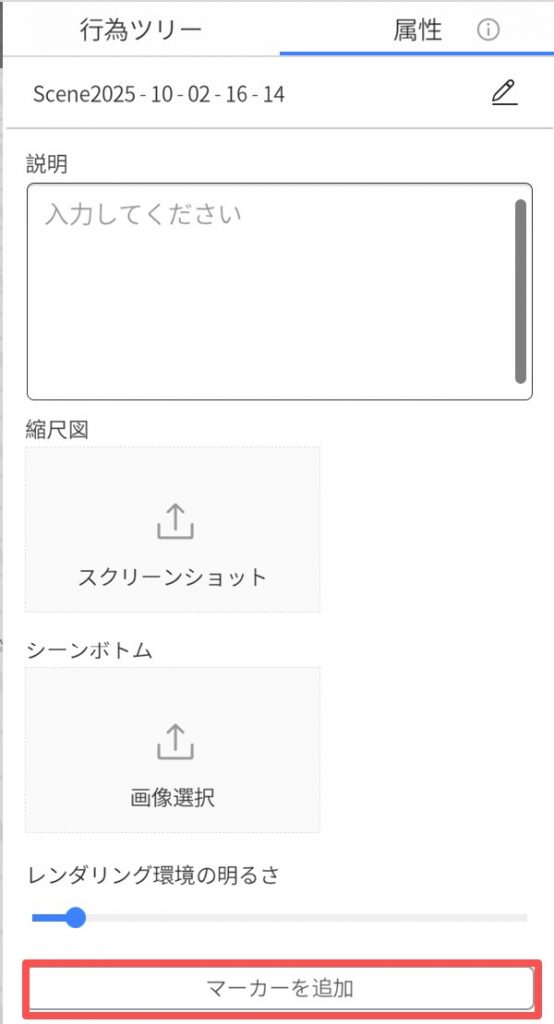
マーカーの追加:いずれのキャラクターも選択していない状態で、属性パネルの【マーカーを追加】ボタンをクリックすると、シーン内に新しいマーカーが作成されます。マーカーには自動的に番号が付与されます。各シーンに追加できるマーカーは最大20個までです。
マーカーの削除:不要なマーカーを選択し、キャラクターリストで【削除】ボタンをクリックすると、そのマーカーをシーンから削除できます
参照モデルの追加
デジタルツインシーンでは、参照モデルを使用してシーンの編集や位置調整を補助できます。
参照モデルの追加手順:
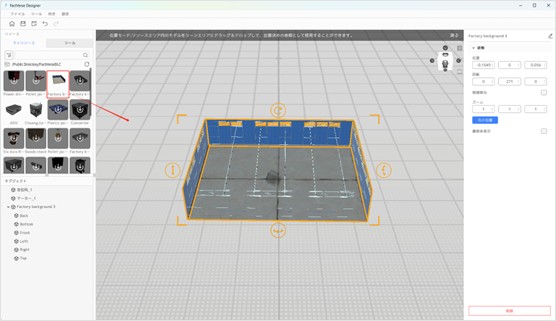
- 位置モードに入る:シーンエディターで、ツールバーの「位置モード」ボタン
 をクリックし、位置モード に入ります。
をクリックし、位置モード に入ります。 - 参照モデルを追加する:参照モデルをシーン内に配置し、シーン編集やマーカー配置の補助に利用します。
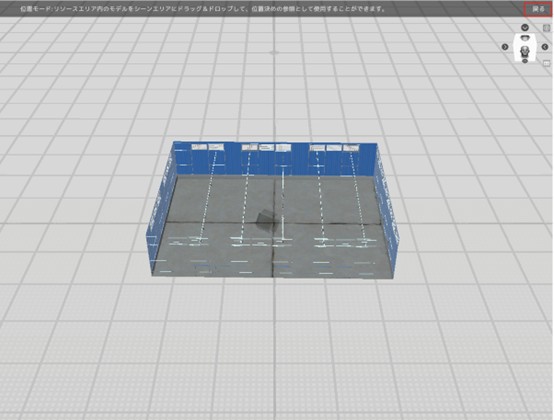
- 位置モードを終了する:【戻る】ボタンをクリックし、位置モードを終了 します。
- 他の要素の位置調整を補助する:参照モデルを使用して、シーン内の他のデジタルツインや要素の位置を調整 し、実際の物理環境と正確に整列 させます。
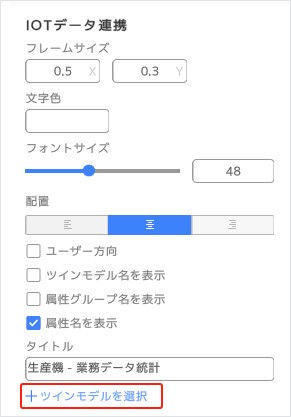
業務データ看板
業務データ看板は、リアルタイムの IoT データ や シミュレーションデータ を表示するために使用できます。ユーザーは プロパティパネル でデータを選択し、文字色、フォントサイズ、データのプレフィックス などを設定できます。
シミュレーションデータをバインドする一般的な操作手順:
- ビジネスデータダッシュボードツールをシーン内に配置します。
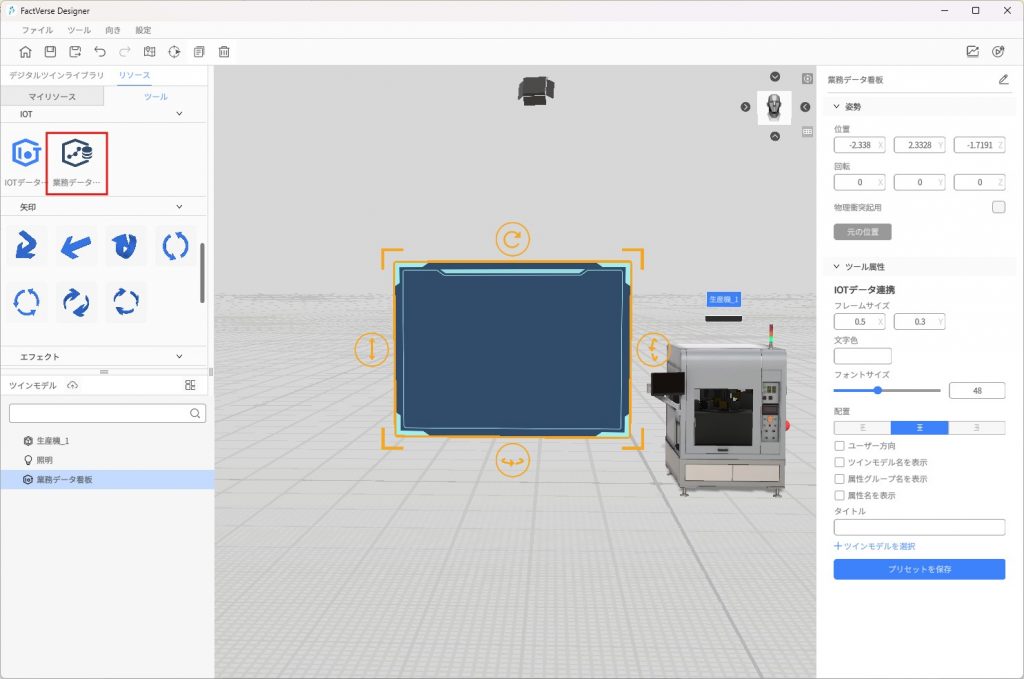
- 看板の位置とサイズを調整する。
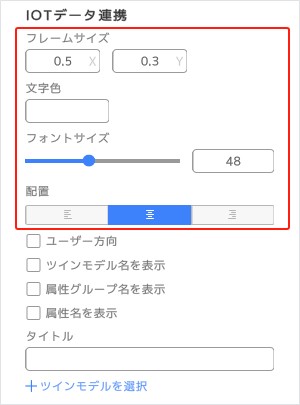
- ビジネスデータダッシュボードを選択し、属性エリアでフォントサイズ・文字色・配置方式を設定します。
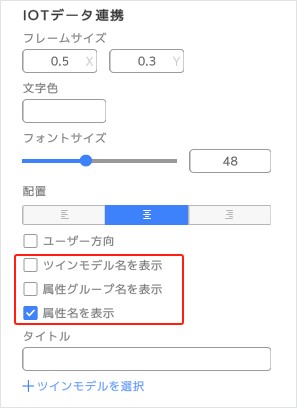
- 表示する内容を選択する(ツインモデルの属性名 など)。
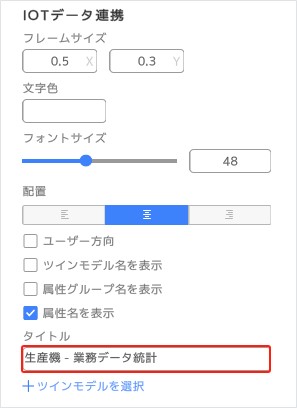
- 看板のタイトルを設定する。
- 【+ツインモデルを選択】をクリックする。
- 【+ツインモデルを選択】をクリックすると、ツインモデル選択リストが表示されます。このリストにはシーン内のすべてのツインモデルが表示され、ツインモデル名で検索することができます。選択リストからバインドしたいツインモデルを見つけ、クリックして選択します。
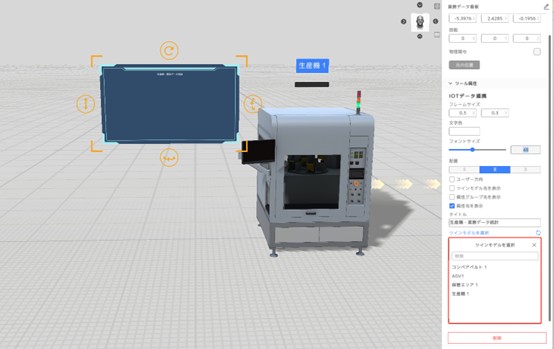
選択後、【+ツインモデルを選択】ボタンは、選択したツインモデル名に変更される。このツインモデル名をクリックすると、選択ウィンドウが再表示され、再選択が可能。
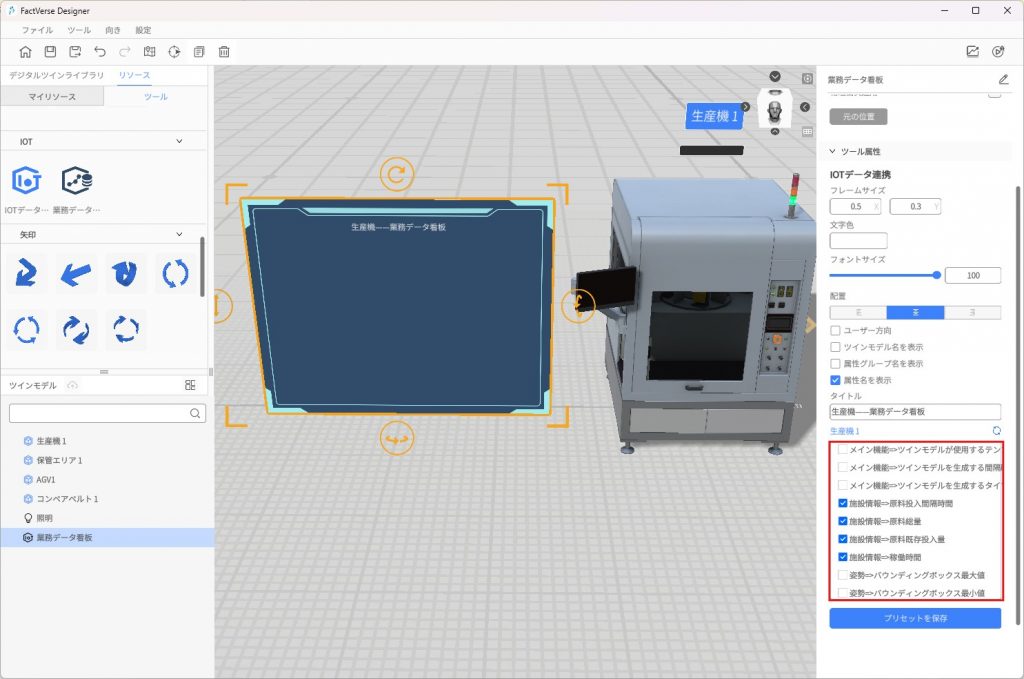
- ツインモデル選択後、ツインモデル名の下に、そのツインモデルのプロパティリストが表示される。表示するプロパティデータを選択する。
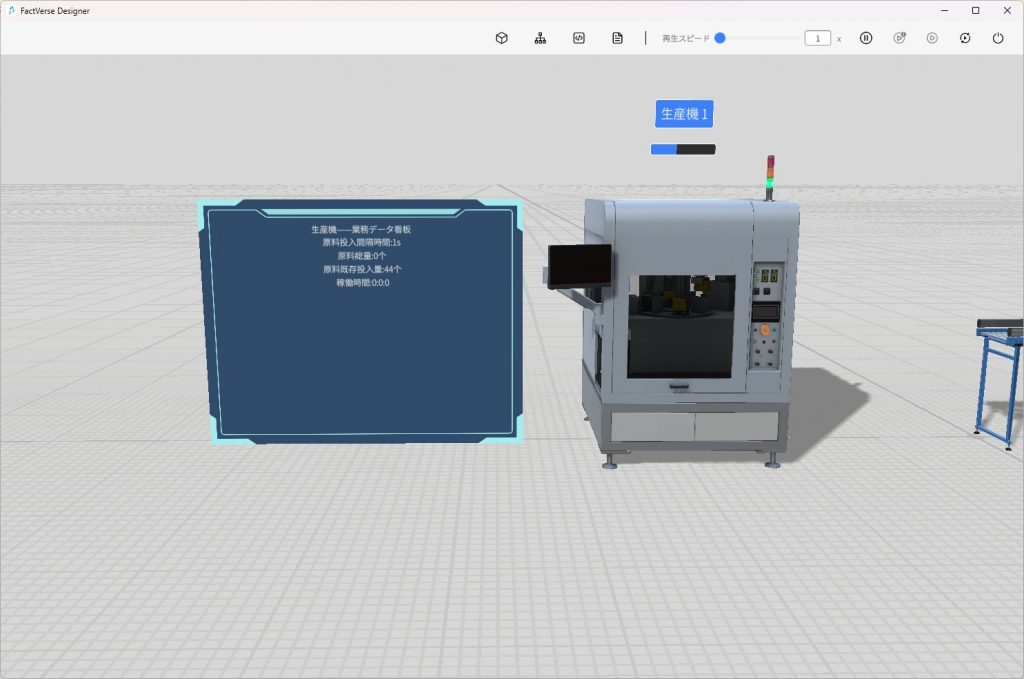
- 画面右上の「再生」ボタンをクリックし、結果を確認する。
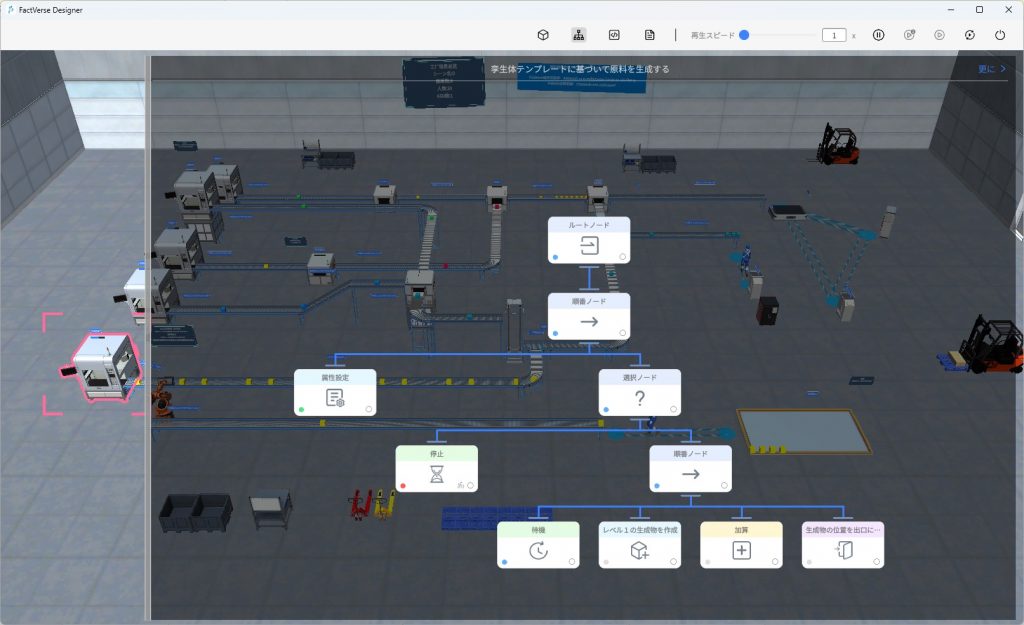
シーンコースウェアの編集
適用対象: 企業内の講師ユーザー
目的:FactVerse Designer でシーンとコースウェアをバインドし、キャラクターにツインモデルの操作を割り当て、さらにカスタム問題のロジック(トリガー、成功・失敗条件、採点ルール)を編集します。シーンコースウェアの編集フロー
コースウェア編集のプロセス概要
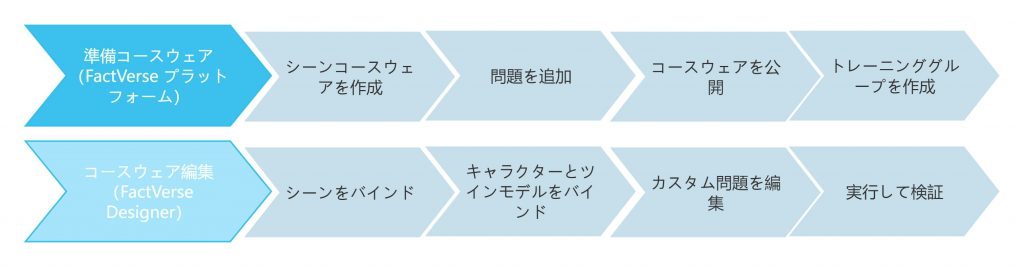
シーンコースウェアの編集プロセスは主に2つの段階に分かれます。
第1段階:コースウェアの準備(FactVerse プラットフォーム上で実施)
- 問題を追加(単一選択・複数選択・カスタム問題に対応)
- コースウェアを公開し、Designer での後続バインドや編集に利用
- トレーニンググループを作成し、受講者に学習・試験タスクを割り当て
- シーンコースウェアを作成し、基本情報(名称、所要時間、合格点数など)を設定
Designer で編集完了後に、プラットフォーム側でトレーニンググループを作成することも可能です。
詳細な操作は『FactVerse プラットフォームユーザーマニュアル』の「学習管理」章を参照してください。
第2段階:コースウェアの編集(FactVerse Designer 上で実施)
- コースウェアとシーンをバインド
- キャラクターとツインモデルをバインド
- カスタム問題のロジックを編集
- 実行して問題設定が正しいか検証
コースウェアとシーンのバインド
バインド関係の注意事項:
- 各コースウェアは 1つのシーンのみ バインド可能です
- バインド後は 変更できません
操作手順
コースウェアの閲覧・編集には、作成時と同じバージョンの Designer を使用することを推奨します。新しいバージョンで作成されたコースウェアを旧バージョンの Designer で開いた場合、問題形式の構造アップグレードにより互換性の問題が発生し、一部の内容が正しく表示・編集できない可能性があります。
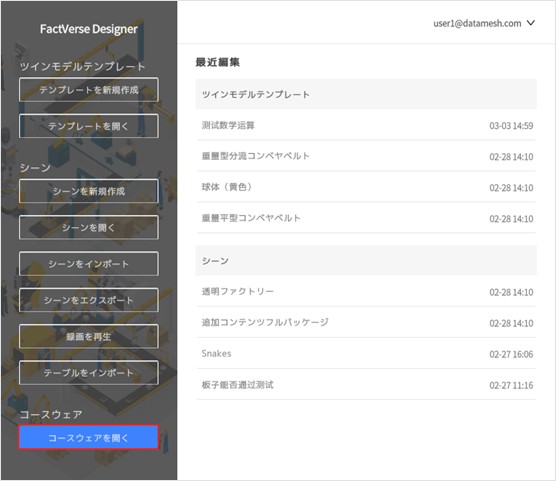
1. ホーム画面で【コースウェアを開く】をクリックし、対象のコースウェアを選択します。
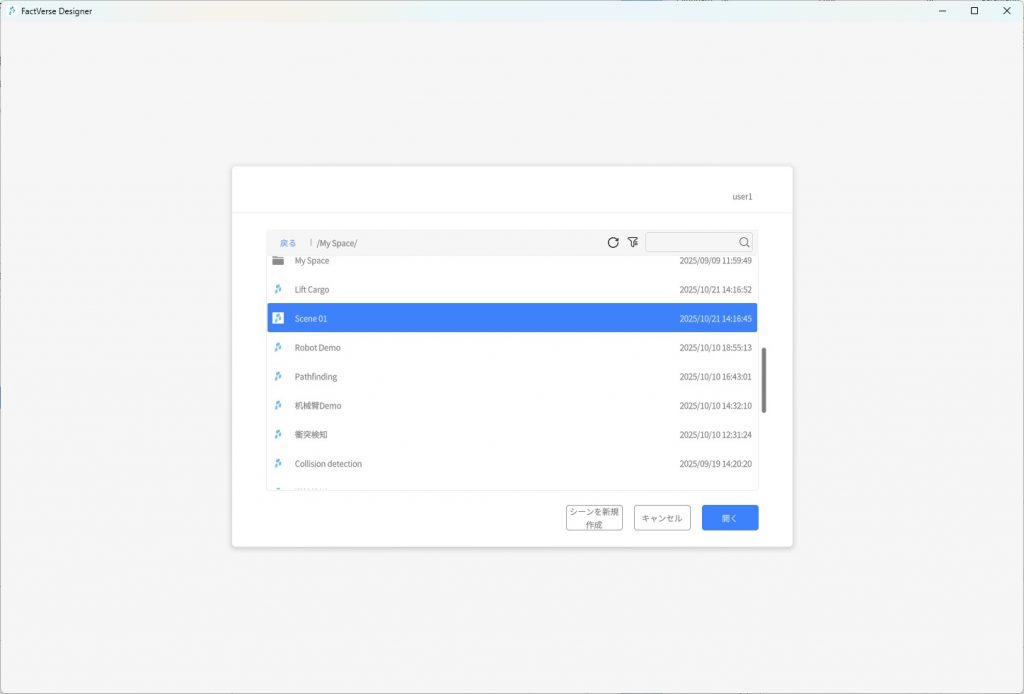
2. シーンが未バインドの場合は、シーンを選択してバインドするか、【新規シーン】をクリックしてシーンを作成します。その後、デジタルツインシーン構築フローに従ってシーンを設計し、バインドを行います。
キャラクターにツインモデルをバインドする
コースウェア内のキャラクターにツインモデルをバインドすると、そのツインモデルは当該キャラクターが試験で操作すべき対象となり、関連する問題ロジックと紐づきます。
試験実行時、受講者は自分のキャラクターを選択してシーンに入ります。システムはそのキャラクターにバインドされたツインモデルを自動的に関連付け、受講者は対応する問題の操作や解答を行います。
例:
- キャラクター = フォークリフトオペレーター、ツインモデル = フォークリフト → オペレーターは運転関連の問題を実施。
- キャラクター = メンテナンス作業員、ツインモデル = 設備パネル → 作業員は設備修復関連の問題を実施。
バインド手順
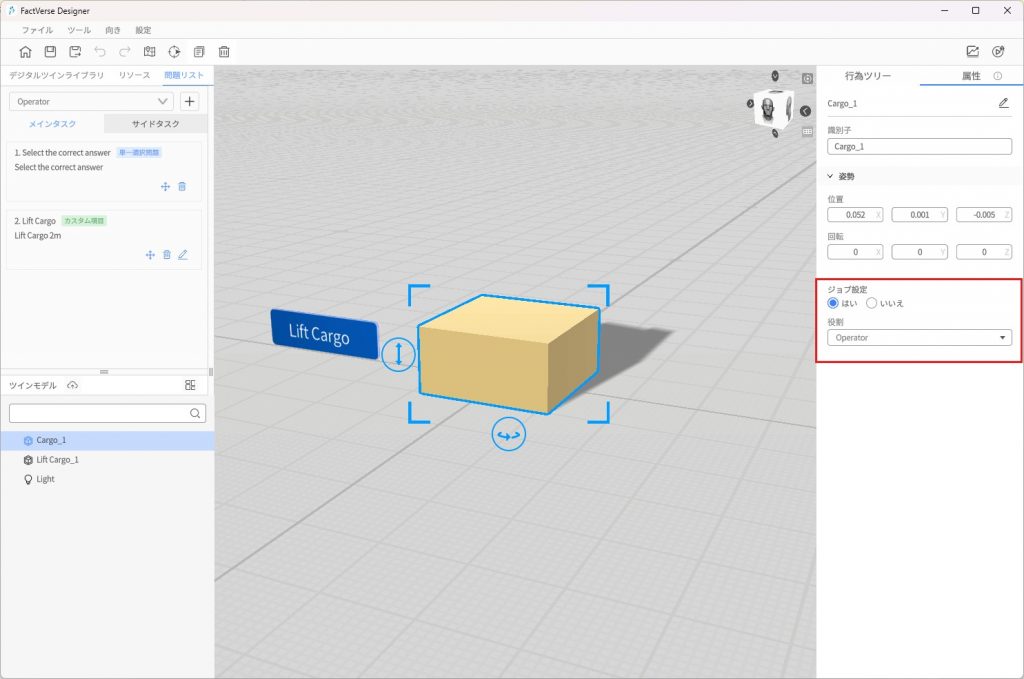
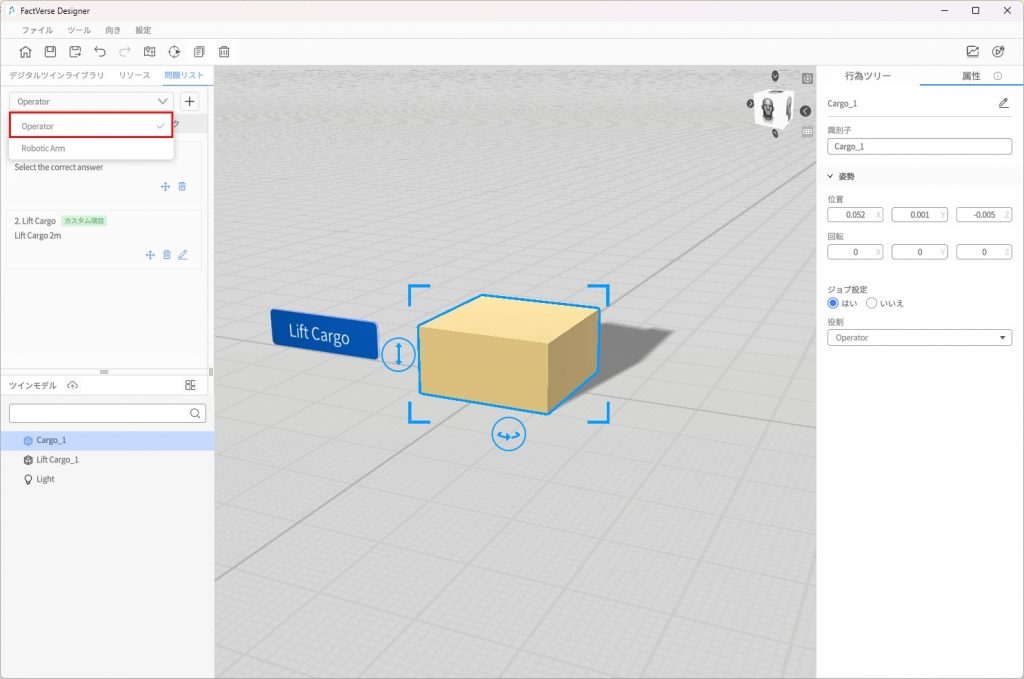
- シーンエリアで対象ツインモデルを選択します。
- 属性パネルで「プレイ」を「はい」に設定し、対応するキャラクターを選択します。
カスタム問題の編集
カスタム問題は次の2つの方法で追加できます。
- FactVerse プラットフォームで追加:問題の基本情報(設問文、キャラクターなど)のみを作成。ロジックや採点は含まない。
- Designer で作成または編集:トリガー条件、成功/失敗ロジック、得点ルールなどを補完。
カスタム問題のロジック設定
1. 判定ロジックの設定
カスタム問題では、トリガー条件・成功条件・失敗条件を設定することで、試験タスクの自動開始・完了判定・違反検出を実現します。
条件タイプ | 説明 |
トリガー条件 | 問題開始の条件を定義。ツインモデルの状態、インタラクション、外部イベントに基づく。 |
成功条件 | 受講者がタスクを完了したとみなす基準。通常は操作結果やツインモデルの状態に依存。 |
失敗条件 | タスク未完了または誤操作とみなす条件。衝突や違反操作など。 |
例:車両障害物回避訓練
シナリオ:受講者が車両を運転して駐車場から出る際、障害物との衝突を避ける必要がある。
トリガー条件:
- 車両が出口に接近:条件「距離を比較」で車両と出口の距離が2m未満かを判定。
- 車両がまだ出口を通過していない:条件「2つのツインモデルの属性値を比較」で「通過状態フラグ=0」。
成功条件:
- 衝突なし:条件「2つのツインモデルの属性値を比較」で「衝突有無=0」。
- 出口を通過:条件「2つのツインモデルの属性値を比較」で「通過状態フラグ=1」。
失敗条件:
- 衝突あり:条件「2つのツインモデルの属性値を比較」で「衝突有無=1」
2. 得点方式の設定
カスタム問題の完了後、システムは以下の方法で得点を計算できます。
得点タイプ | 説明 |
直接得点 | 完了すると固定点数を付与(例:100点)。 |
時間得点 | タスク所要時間に基づき、設定した時間区間ごとの比率で得点を計算。 例: 成功時得点 = 100点 この操作の時間区間の重み = 80% → 実得点 = 100 × 80% = 80点 【時間得点】を有効化しない場合は「直接得点」がデフォルト。 |
時間得点を有効にする場合は、カスタム問題の設定画面で【時間得点】にチェックを入れ、各時間区間の割合を設定してください。

編集手順
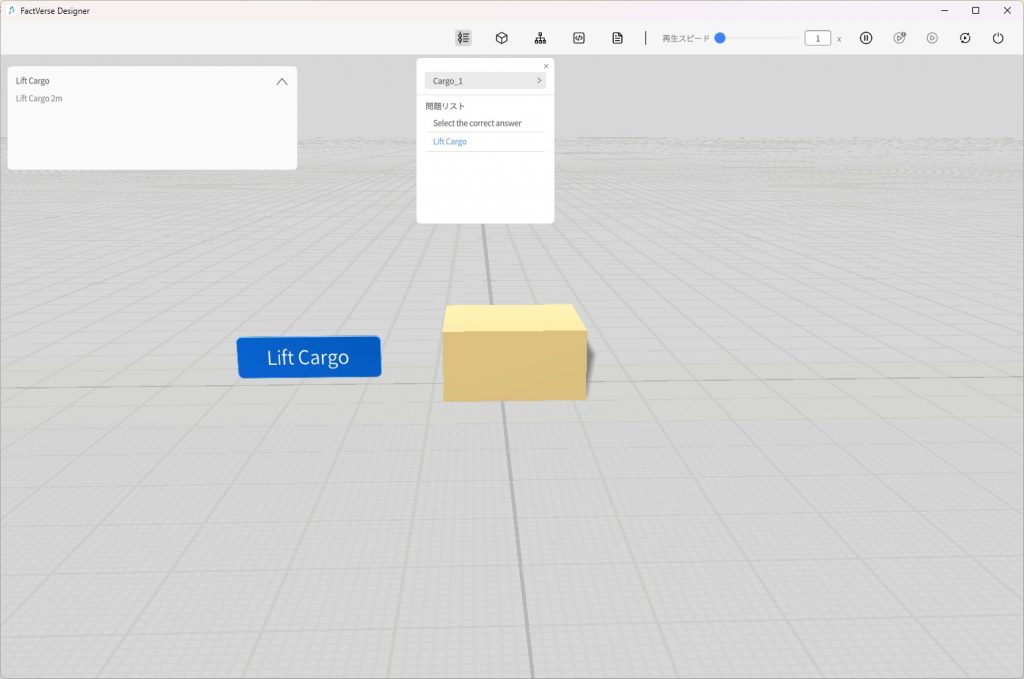
1. インタラクションロジックの設定:問題を編集する前に、関連するツインモデルの属性変化や移動など、課題実行に必要なシーン内のインタラクションロジックを設定しておきます。
2. キャラクター関連の問題を表示:左側の問題リストでキャラクターを選択し、そのキャラクターに対応する問題リストを展開します。
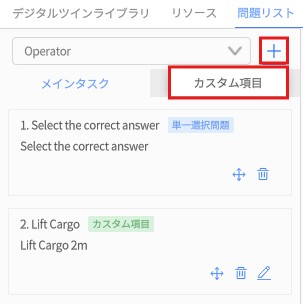
3. カスタム問題を新規作成:
プラットフォームで作成されていない場合は、Designer 内で【+】 > 【カスタム問題】をクリックして作成します。
問題がすでにプラットフォームで作成されている場合は、この手順を省略できます。
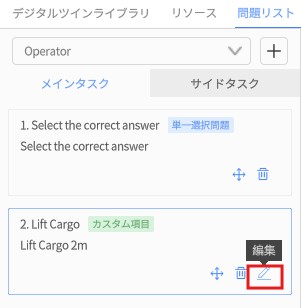
4. 問題ロジックを編集:問題リストで目標問題の右側にある【編集】アイコンをクリックし、問題編集ウィンドウを開きます。
5. 条件と得点ルールを設定:編集画面で問題のトリガー条件・成功/失敗条件・得点方式(直接得点/時間得点)を設定します。
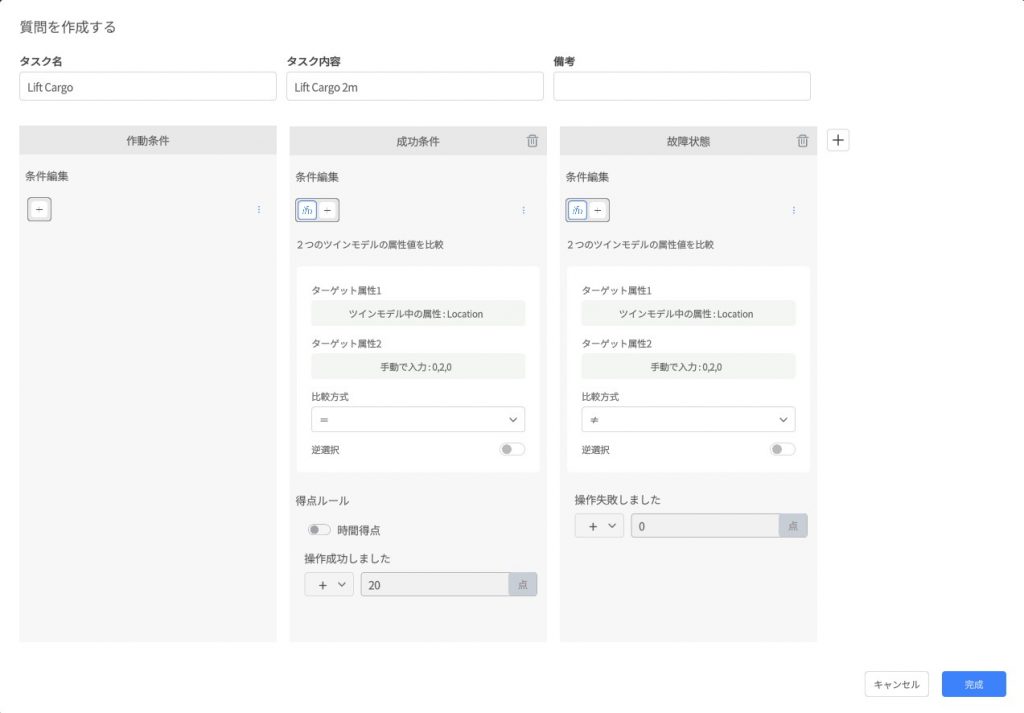
6. 問題の保存:設定完了後、【完了】ボタンをクリックして編集内容を保存します。
実行検証
受講者の操作をシミュレーションすることで、問題の設定ロジックや採点メカニズムが期待通りに機能するかを検証できます。
操作手順
- コースウェアを再生:ツールバーの【デバッグ再生】ボタン
 をクリックし、コースウェアのシミュレーション実行モードに入ります。キャラクターリストから解答するキャラクターを選択します。
をクリックし、コースウェアのシミュレーション実行モードに入ります。キャラクターリストから解答するキャラクターを選択します。
- 問題テストを実行:再生画面で模擬解答を行い、問題設定が正しく動作するかを確認します。
- 選択問題:単一選択・複数選択が正常に解答・採点できるか確認。
- カスタム問題:設定したインタラクション操作(クリック、ツインモデルのドラッグ等)で問題がトリガーされるか確認。
- 判定ロジックのテスト:
- 正しい操作は「成功」と判定されること。
- 誤操作や違反操作は「失敗」と判定されること。
- 得点検証:採点が設定ルール(直接得点・時間得点など)に沿っているか確認。
- エディターに戻って調整(必要に応じて):テスト中にトリガー異常・判定の不正確さ・採点エラーなどが見つかった場合は、編集画面に戻り、問題設定を修正して再度検証を行います。
衝突検知
衝突検知 機能は、シミュレーション中にツインモデル同士が物理的に接触したかどうかを判定する機能です。これにより、シーン設計の妥当性や動作経路の安全性を検証できます。衝突検知を活用することで、潜在的な設計不備を早期に発見し、設備レイアウトや運用経路を最適化し、事故リスクを低減することが可能となります。
主要ステップ
衝突検知を実現するには、以下の設定が必要です。
- 衝突結果を出力するツインモデルを指定
- 該当ツインモデルのテンプレートで「衝突に参加」を有効化
- テンプレートに「衝突検知」プリセット構造を追加
→ この構造がツインモデルの衝突情報(衝突対象、キャラクター、時間など)をリアルタイムに記録
- その他の衝突対象(ツインモデルまたはモデル)の設定
- シーン内で対象オブジェクトの「衝突に参加」属性を有効化し、衝突の相互作用を可能にする。
- シミュレーションの実行と結果分析
注意事項:
- 衝突検知には、関与するすべてのオブジェクト(ツインモデル/モデル)の「衝突に参加」を有効化する必要があります。
- 「衝突検知」プリセット構造を追加したツインモデルのみが衝突結果を出力・記録します。
- シーン内に複数の検知対象を含めることは可能ですが、少なくとも1つのツインモデルが出力を担当する必要があります。
実現フロー
核心ステップ:
- 物理衝突を有効化
- 衝突検知の構造を追加
- 行為ツリーで衝突イベントをキャッチ
- カウント & 出力
注意事項:
- 物理衝突を有効化したモデルのみが衝突検知を実行できます。衝突検知を行うテンプレート A・B の両方で、物理衝突を有効化してください。
- 衝突の結果は、「衝突検查」プリセット構造を追加したテンプレートが提供します。例えば、B テンプレートで衝突結果を取得したい場合、B テンプレートに「衝突検查」プリセット構造を追加する必要があります。
- 行為ツリーを使用して、「衝突状態確認」プロパティ値を読み取り、対応する処理を実行します。例:ログの記録、カウント処理などを実行。
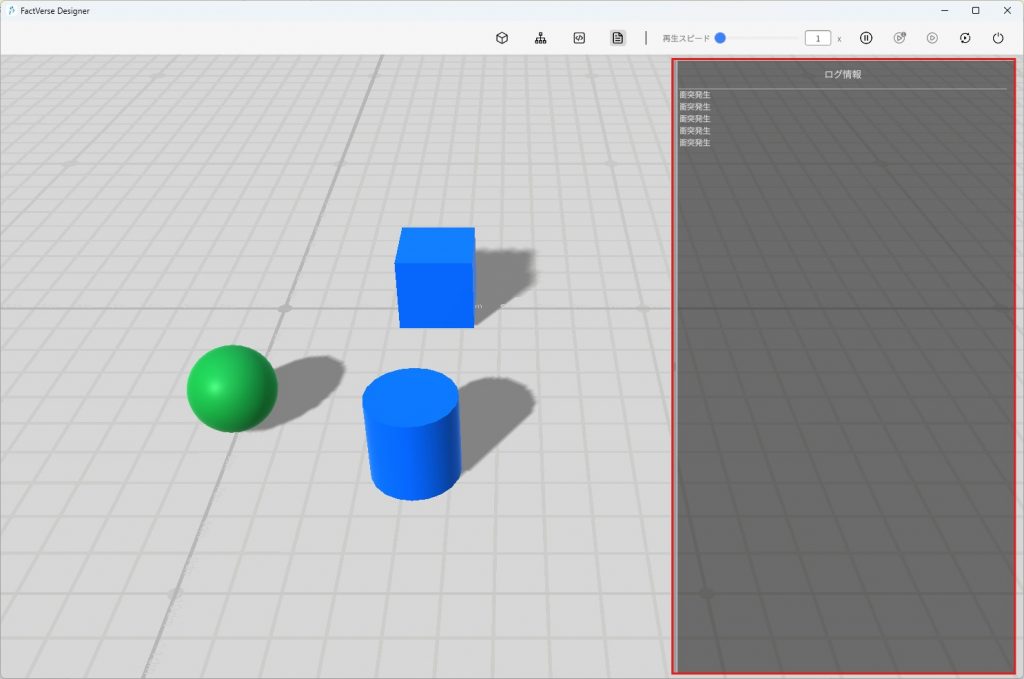
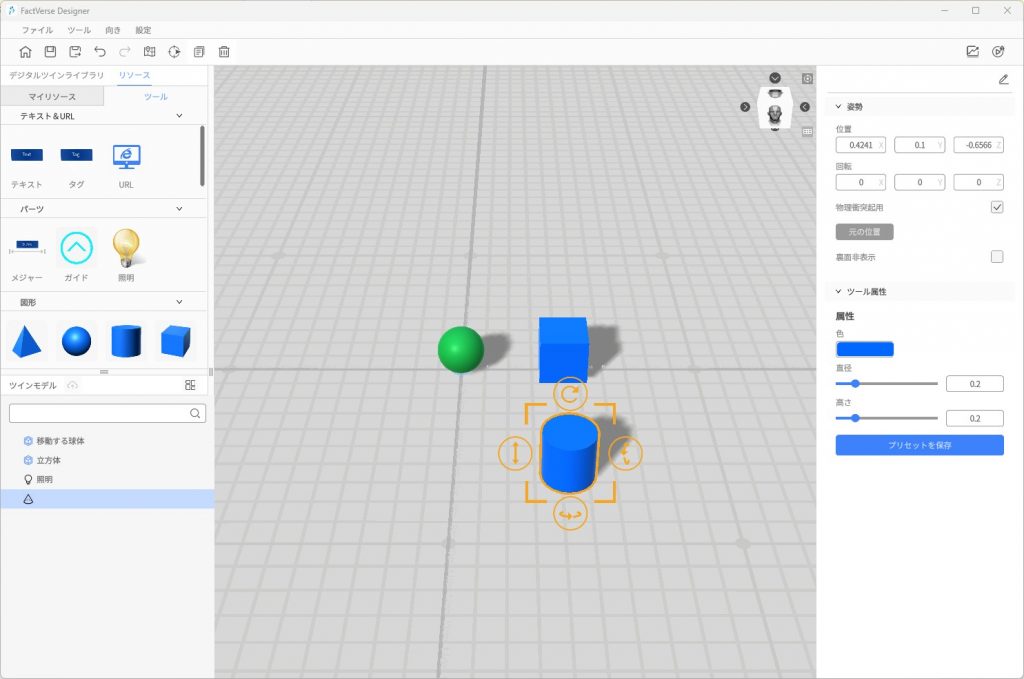
例
本例では、移動する球体ツインモデルと静止している立方体および円柱モデルの衝突をシミュレーションし、衝突検知が正しく機能するか、およびツインモデルの属性に衝突情報が反映されるかを確認します。
操作手順
- 移動可能な球体テンプレートを作成:「移動する球体」章を参照し、移動動作を含む球体ツインモデルのテンプレートを作成します。
- 球体の物理衝突参加を設定:球体を選択し、属性パネルで「衝突に参加」をチェック。これにより物理エンジンによる衝突検知ロジックに参加します。
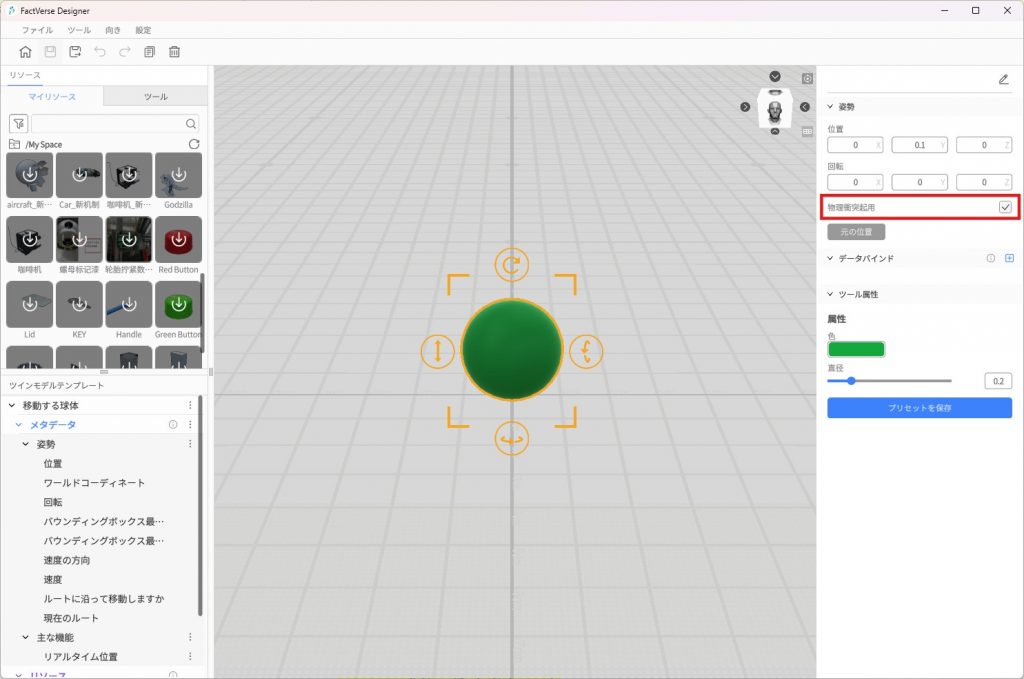
- 球体テンプレートに「衝突検知」プリセット構造を追加:球体テンプレートにシステムプリセット「衝突検知」構造を追加し、衝突状態を取得します。
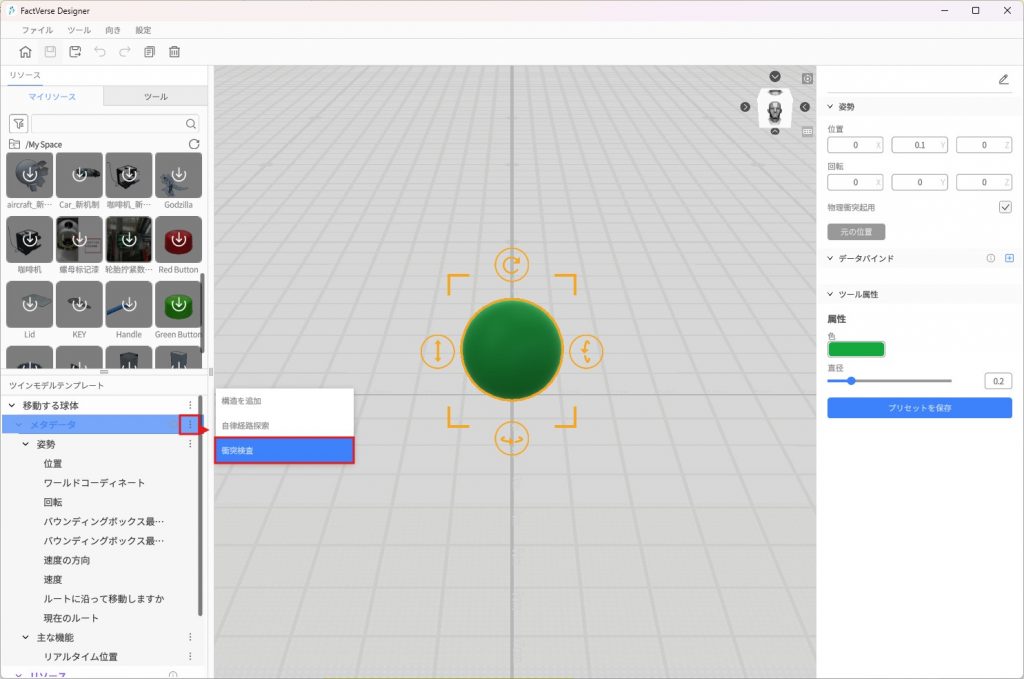
プリセット構造の属性例:
属性名 | 型 | 説明 |
衝突したツインモデル | string | 衝突相手ツインモデルの名称を記録 |
衝突したキャラクター | string | 衝突相手ツインモデルにバインドされたキャラクター名を記録 |
衝突有無 | bool | true=衝突あり、false=衝突なし |
- 球体テンプレートを保存:設定後、【保存】ボタンをクリックしてテンプレートを保存。
- 立方体テンプレートを作成し、衝突参加を設定:
a) テンプレートエディターで新規立方体テンプレートを作成し、立方体モデルを配置。
b) 属性パネルで「衝突に参加」をチェック。
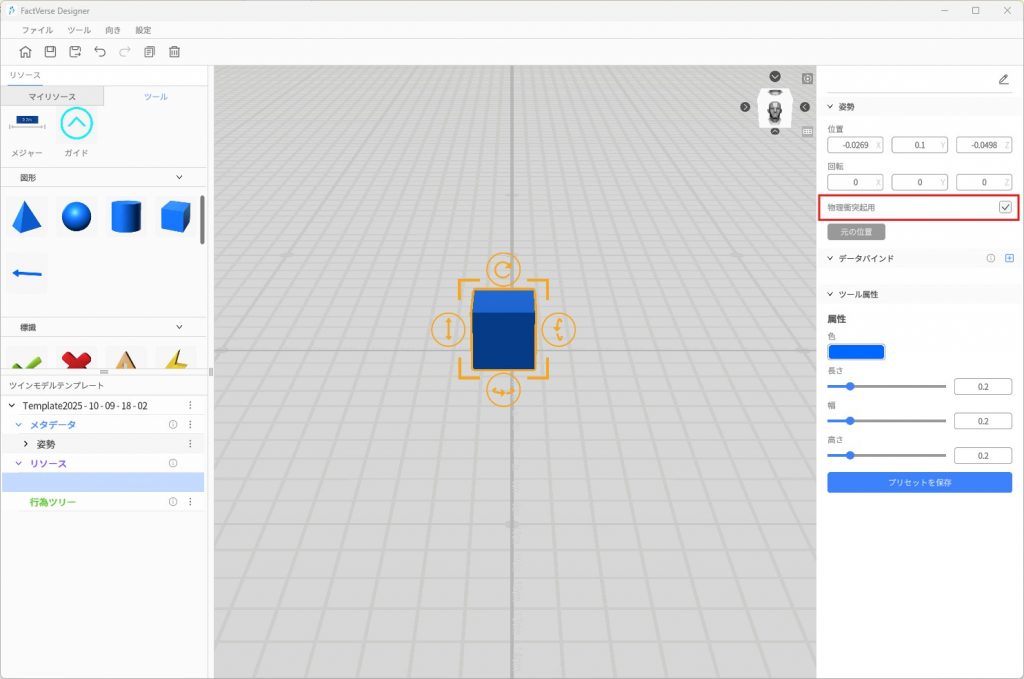
c)【保存】をクリックしてテンプレートを保存。
- テストシーンを構築:
a) 新しいテストシーンを作成。
b)「移動する球体」「立方体」ツインモデルをシーンに追加。
c) 静止した円柱モデルを追加し、複数対象との衝突を検証。
d) 球体の移動経路上に立方体や円柱を配置。
- 再生プレビュー:
a) ツールバーの【デバッグ再生】をクリックし、シーンを実行。
b) 球体ツインモデルを選択し、属性パネルを表示。
c) 「衝突したツインモデル」「衝突したキャラクター」フィールドに正しい情報が表示されるか確認。
- シミュレーション分析:衝突分析表の参照方法については該当章を参照してください。
自律経路探索
自律経路探索 機能は、3D 経路シミュレーション・衝突検知・安全範囲モデリングに基づき、ツインモデルに自動化かつ障害物回避を伴う経路計算能力を提供します。AMR(Autonomous Mobile Robot、自律移動ロボット)の自律走行や、人員の安全経路シミュレーションなど、複雑なシナリオに適用できます。
適用シナリオ
シナリオ種別 | 説明 |
物流・作業最適化 | 設備や人員の最短経路を迅速に計算し、エネルギー消費や経路ロスを削減 |
リスク予測・回避 | 経路シミュレーションで潜在的な衝突・スタックリスクを発見し、工程レイアウトや作業フローを最適化 |
用語解説
用語 | 説明 |
自律経路探索 | 「自律経路探索」プリセット属性を追加したツインモデルのみ、【自律経路移動】ノードを実行可能 |
安全範囲ボックス | ツインモデル経路探索時の物理的占有範囲を示す。ワイヤーフレームの円柱で表示され、障害物回避や経路計算に利用 |
安全範囲直径/高さ | 安全範囲ボックスのサイズ定義。「自律経路探索」構造で設定。単位:m |
自律経路移動 | 行動ツリーノード。経路面で計算された最適経路に沿ってツインモデルを移動させる |
経路面 | ツインモデルが移動可能な領域を定義。経路はこの領域内でのみ計算される |
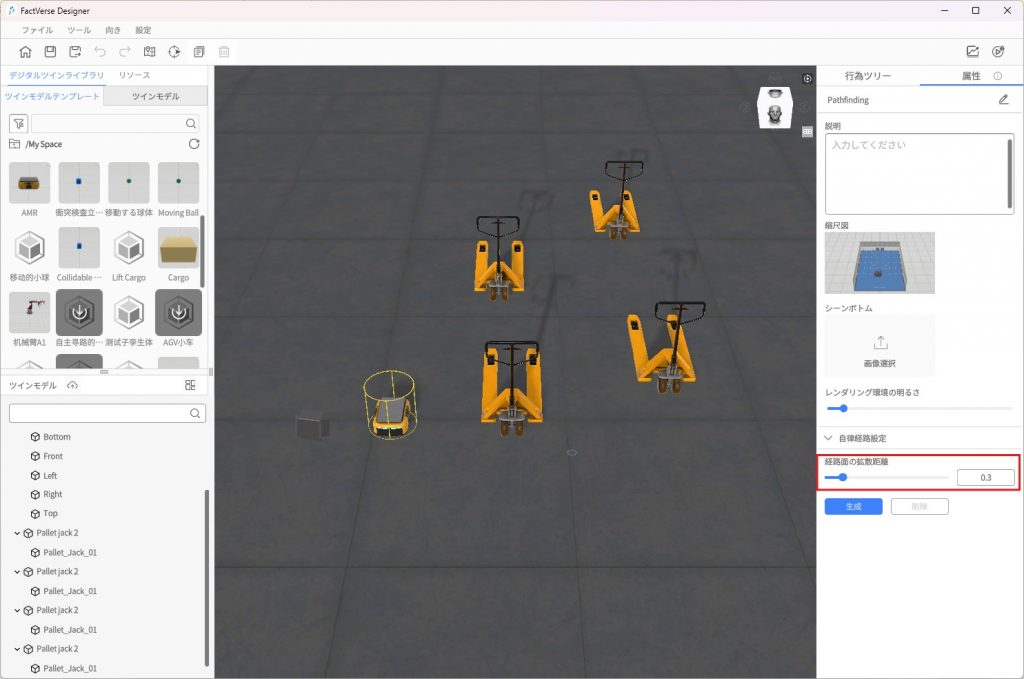
経路面拡散距離 | 経路面生成時に、ツインモデルと最終経路面境界との間に設けるバッファ距離。衝突を避けるための余裕 |
主要ステップ
自律経路探索は通常、次の4段階で実現します:
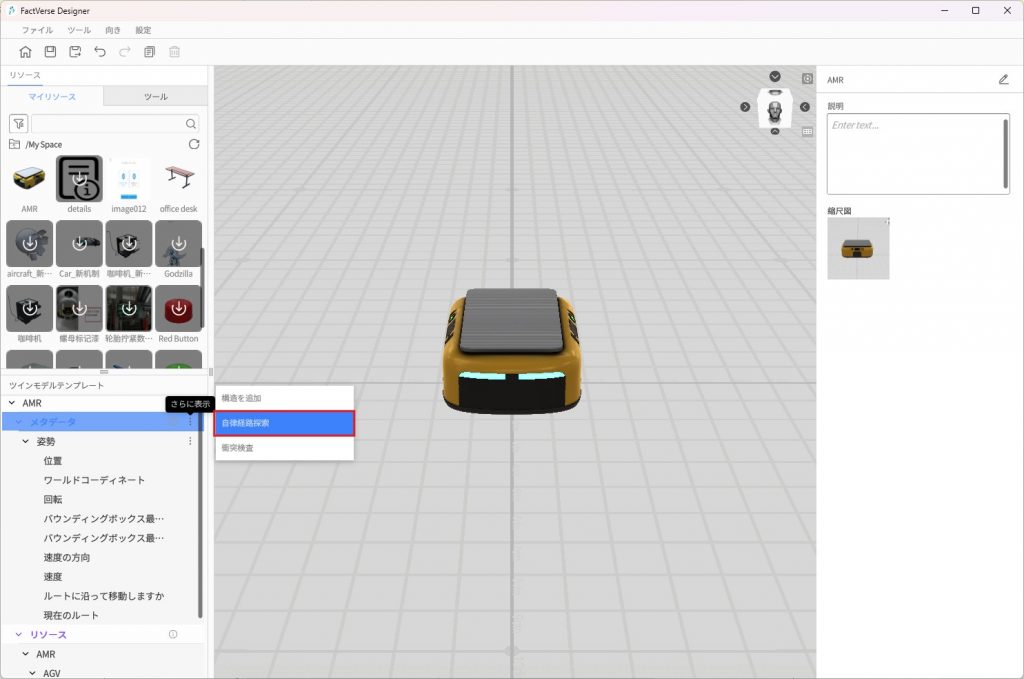
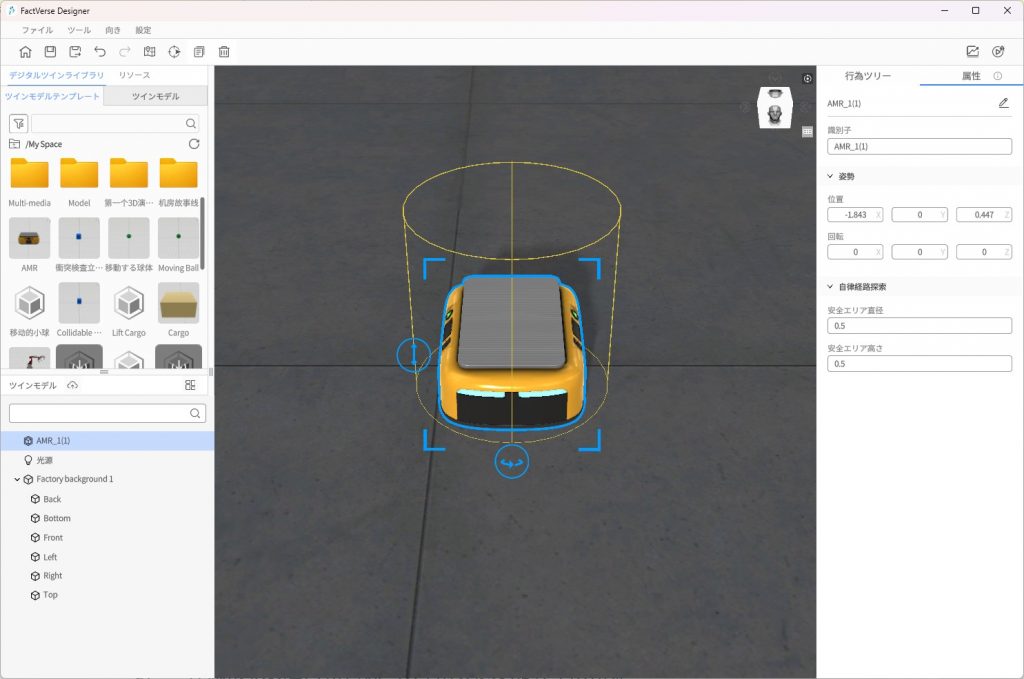
- ツインモデルの設定
- 目標ツインモデルのテンプレートに「自律経路探索」構造を追加。
- 自動的に安全範囲ボックスが生成され、属性パネルで直径・高さを設定可能。
注:律経路探索と「衝突に参加」は同時に有効化できません。経路探索に参加させたい場合は「自律経路探索」のみを残してください。
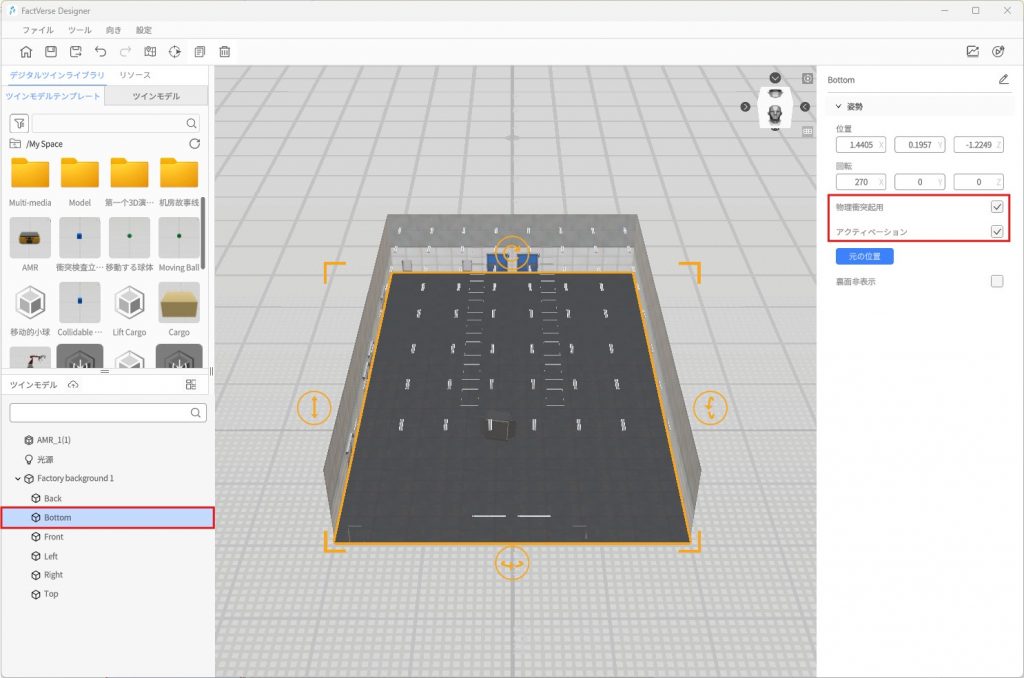
- シーンの経路環境を設定
- 経路面用の地面モデルを追加し、「衝突に参加」を有効化。
- 経路探索対応ツインモデルをシーンに配置。
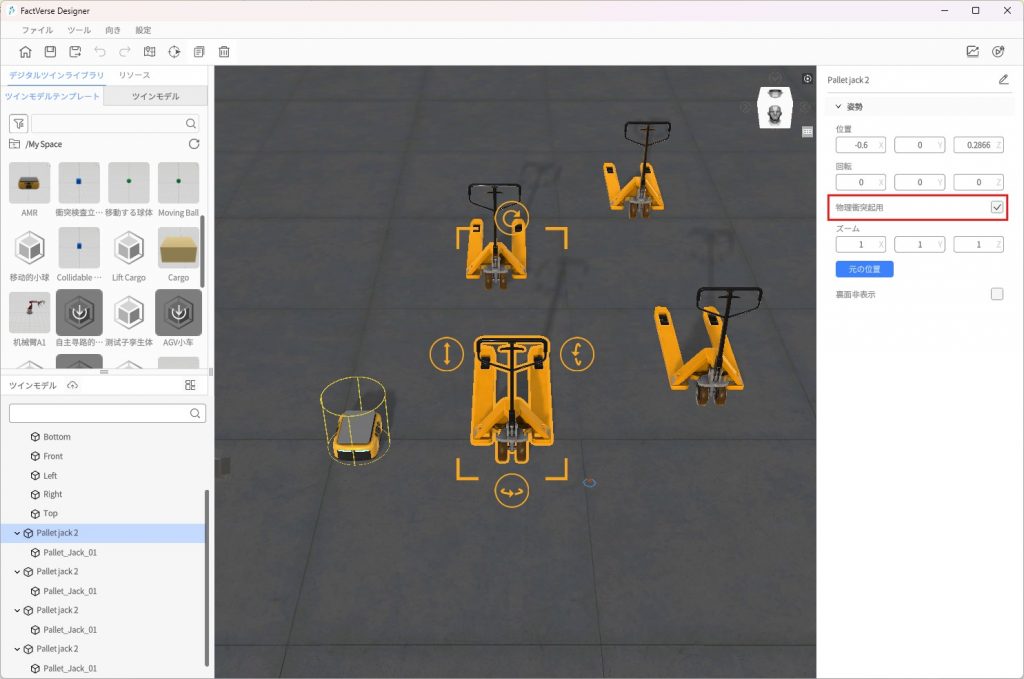
- 障害物を配置(「衝突に参加」を有効化する必要あり)。
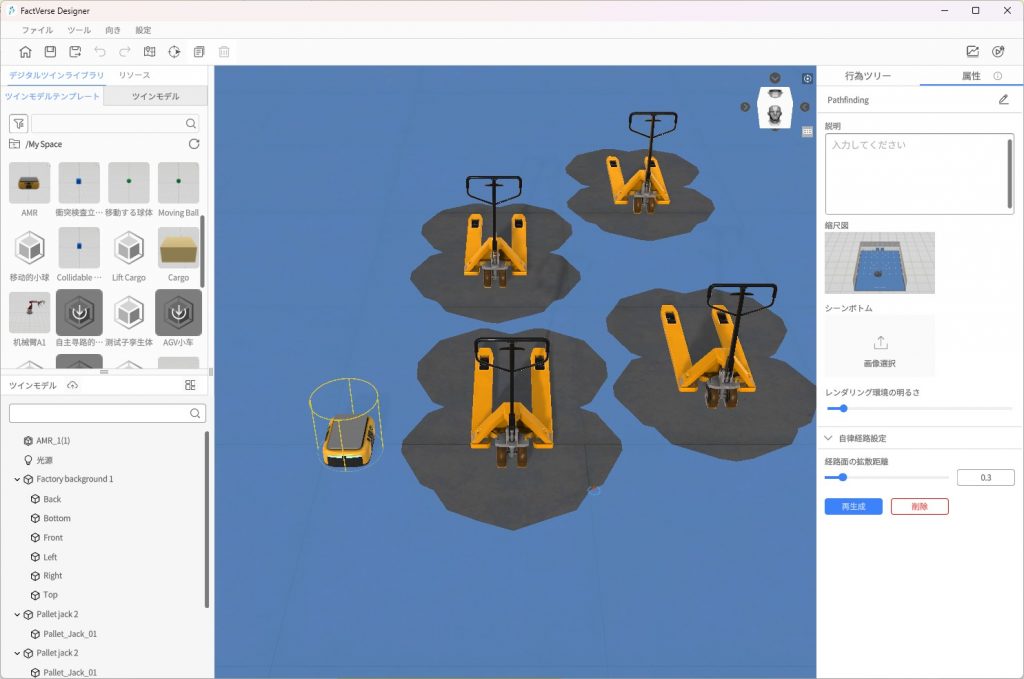
- 経路面を生成
- [シーン属性] → [自律経路探索設定] で拡散距離を設定(デフォルト2m)。
- 【生成】をクリックすると、自動的に移動可能領域を構築。
- シーン構成を変更した場合は【再生成】が必要。
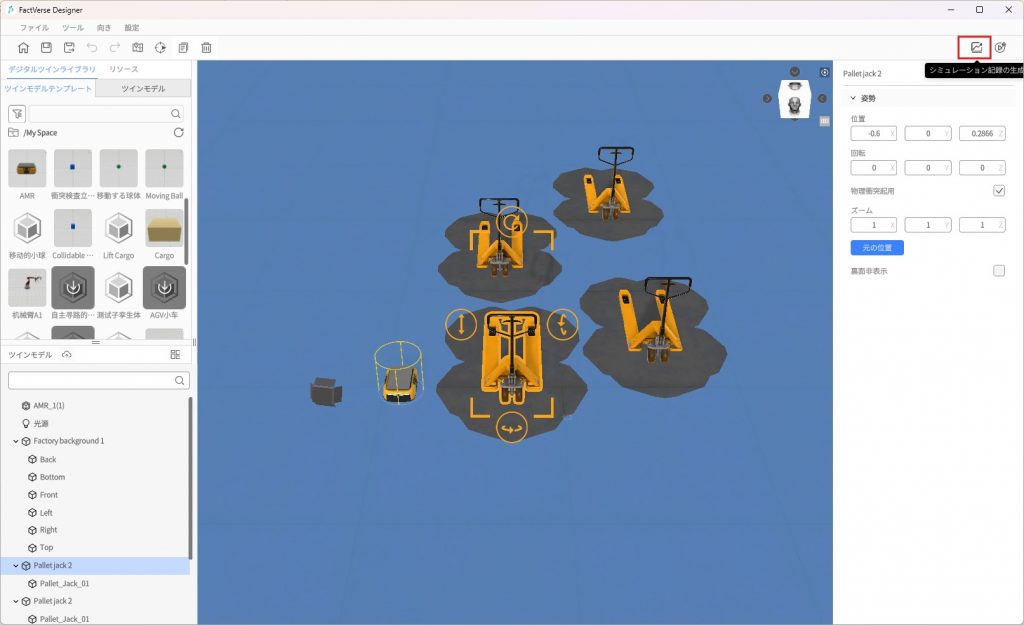
- 経路探索の効果を検証
- 【シミュレーションリプレイ】機能でシミュレーション記録を生成・再生
- ダッシュボードで「経路分析表」「衝突分析表」を確認し、経路をシーンに重ねて表示
- 衝突や障害回避の失敗、経路異常がないかを確認
- 必要に応じて経路面設定、安全範囲、障害物位置を調整し、再生成して再度検証。
詳細は 「シミュレーションリプレイ → 実行経路の確認」 を参照してください
例
以下は、ツインモデルに自律経路探索機能を設定する手順例です:
- テンプレートエディターを開く:対象のツインモデルテンプレートを開く。
- 「自律経路探索」構造を追加:テンプレートに追加すると、自動的に中央に安全範囲ボックスが生成されます(移動不可)。
- 安全範囲パラメータを設定:属性パネルで直径・高さを入力。
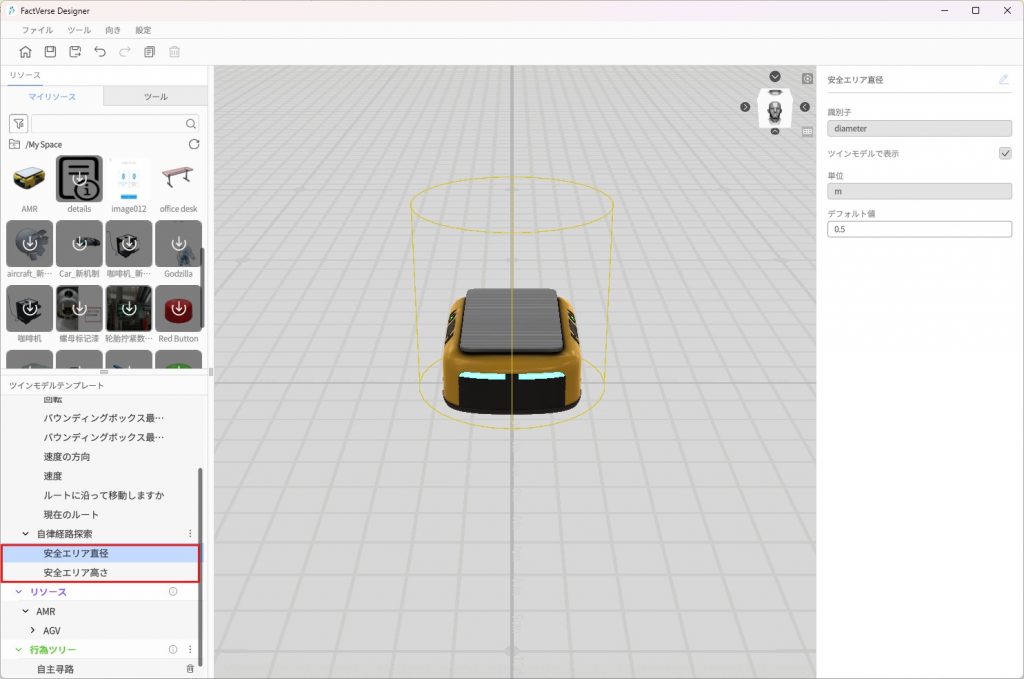
属性名 | 型 | デフォルト値 | 編集可否 | 表示状態 |
安全範囲直径 | double | 0.5 m | 可 | 表示 |
安全範囲高さ | double | 0.5 m | 可 | 表示 |
- 行動ツリーノードを設定:
a) 行動ツリーを新規作成し、【自律経路移動】ノードを追加。
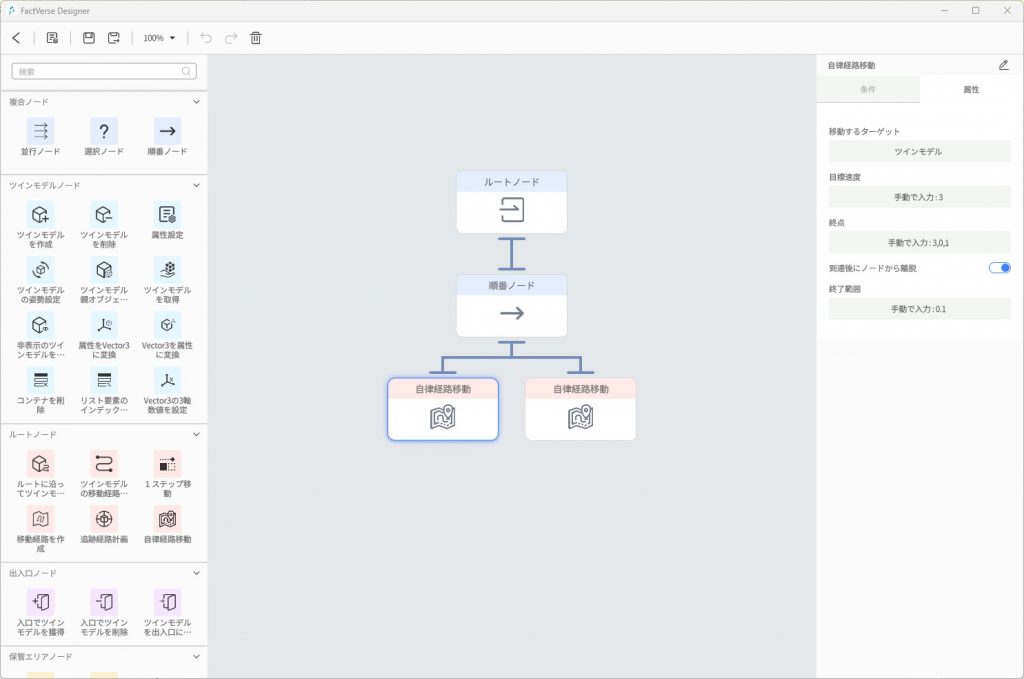
b) 属性設定:
設定項目 | 説明 |
移動対象 | 経路探索を実行するツインモデルを選択 |
目標速度 | 最大移動速度(加速/減速状態を除く通常速度) |
終点 | 経路の終点位置を設定(ツインモデル、出入口、手動入力などを指定可能) |
到達後ノード終了 | 終点に到達した際に、このノードを自動的に終了して次のノードに進むかどうかを設定。 • ON:終点までの距離が「終了判定範囲」以内に入った時点で自律経路探索を終了。 • OFF:終点に到達してもこのノードは終了せず、終点位置が変化した場合は継続して経路探索を実行。 |
終了判定範囲 | ツインモデルが終点までの距離でこの値未満になった場合、「終点到達」と判定(単位:m) |
- テンプレートを保存:設定後、テンプレートを保存して終了。
- シーンの経路環境を構築
a) 経路用の地面モデルを追加し、「衝突に参加」を有効化。
b) 自律経路探索構造を設定したツインモデルをシーンに配置。
c) 任意形状の障害物を配置し、「衝突に参加」を有効化。
- 経路面を生成
a) シーン属性で拡散距離を設定。
b) 【生成】をクリックして自動的に移動可能領域を構築。
- 経路探索の効果を検証
a) シミュレーション記録を生成してアップロードする。
b) シミュレーション実行経路を確認する。
c) 検証結果に基づき、シーンのパラメータを調整して最適化を行う。
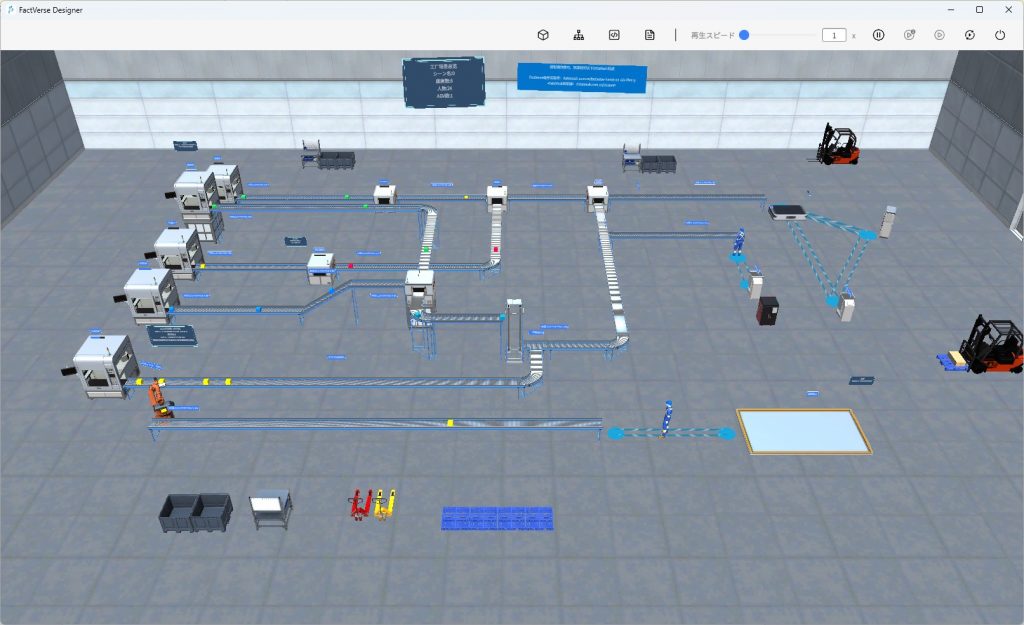
シミュレーションリプレイとデータ分析
Designer では、シミュレーションリプレイおよび DFS ダッシュボード機能を利用して、機器のさまざまな運転条件下でのシミュレーションデータを収集・分析できます。3D シーンのリプレイと多次元データの可視化により、シミュレーション過程を深く理解し、運転効果を評価し、その後の最適化に役立てることができます。
注意:本機能は現在 Windows システムのみ対応しています。
本機能により以下が実現可能です:
- 機器の運転パラメータ(速度、温度、圧力など)、生産進捗データ(完成数、生産時間など)、および機器故障データの収集
- 可視化チャートを生成し、シミュレーション結果を直感的に表示
- 分析結果に基づいてパラメータ設定を最適化し、プロセスを継続的に改善
- 機器の運転効率とリソース利用率を向上させ、生産コストを削減し、製品品質と納期能力の向上を支援
基本フロー
シミュレーションリプレイと分析の全体フローは以下の 3 段階です:
- シーン構築:衝突検知、自律経路探索、生産プロセスなど、主要なシミュレーションロジックを含むシーンを構築する。
- シミュレーション記録の生成とアップロード:シーン実行中にシミュレーションデータを生成し、その記録を DFS データプラットフォームにアップロードする。
- シミュレーション分析の実施:シミュレーションリプレイ画面に入り、DFS ダッシュボードと組み合わせて以下の分析を行う:
- 多次元データチャート分析の閲覧。
- 3D シミュレーション過程のリプレイによる運転挙動の理解。
- 衝突分析表の確認によるリスクイベントの特定。
- 運転経路の可視化により、機器のスケジューリングとレイアウトを最適化。
シミュレーション記録の生成とアップロード
シミュレーション記録を生成することで、シミュレーションの実行結果を保存し、後続の分析に利用できます。
操作手順
- 対象シーンを開く:シミュレーション記録を生成する対象シーンを開く。
- シミュレーション記録を生成:
a) ツールバーの【シミュレーション記録を生成】ボタン![]() をクリックする。
をクリックする。
b) 表示された【シミュレーション記録を生成】ウィンドウで以下を設定する:

- シミュレーション名:デフォルト形式は YYYY-MM-DD_V1、最大30文字。
- シミュレーション時間:形式は DD:HH:MM:SS。各フィールドの最大値は 99、整数のみ入力可。
- 高速シミュレーション実行:
- チェックした場合:【シミュレーション時間】の入力が必須となり、システムは高速で実行結果を生成。
- チェックしない場合:【シミュレーション時間】は任意入力で、システムは 1 倍速で実行。
特殊ケース(衝突/経路探索シミュレーションを含む場合):高速実行は選択不可、時間は未入力可。システムはデフォルトで 1 倍速実行。
c) 【確認】をクリックし、シミュレーション実行を開始。
推奨:シーンシミュレーション実行中は、他の大規模アプリケーションを終了しておくと安定性が向上します
- シミュレーション記録のアップロード
- 自動アップロード:シミュレーション時間を設定した場合、実行終了後にシステムが自動的に記録をアップロードする。
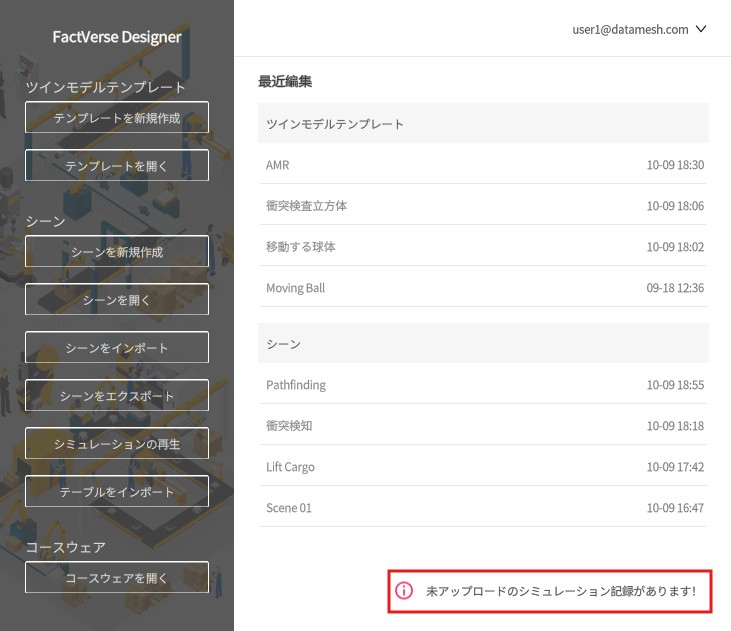
- 手動アップロード:シミュレーション時間を設定していない場合、シミュレーション実行画面の終了ボタンをクリックし、表示される確認ダイアログで【はい】を選択すると記録がアップロードされる。
【いいえ】を選択した場合、ホームに戻った際に画面右下に「未アップロードのシミュレーション記録があります」と表示され、その通知をクリックしてアップロードできる。
- 保存パス:アップロード後のシミュレーション記録は DFS に保存され、Designer_Scenes ディレクトリ配下の該当シーンに分類される。
シミュレーションリプレイへのアクセス
以下の 2 通りの方法でシミュレーションリプレイに入ることができる:
方法1:アップロード完了後に直接入る
- シミュレーション記録アップロード完了ダイアログで【確認】をクリックすると、システムが自動的に DFS ページを開く。
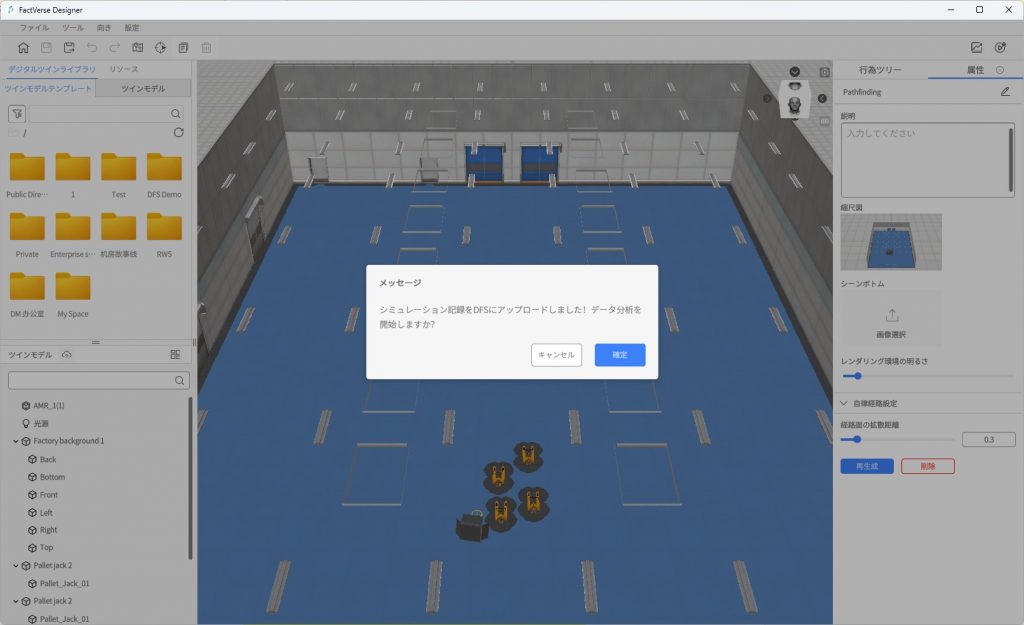
- DFS ページは Designer シーン上にウィンドウ形式で表示され、デフォルトで最大化される。
- データダッシュボードが未設定のシーン:直前にアップロードしたデータセットページに遷移する。
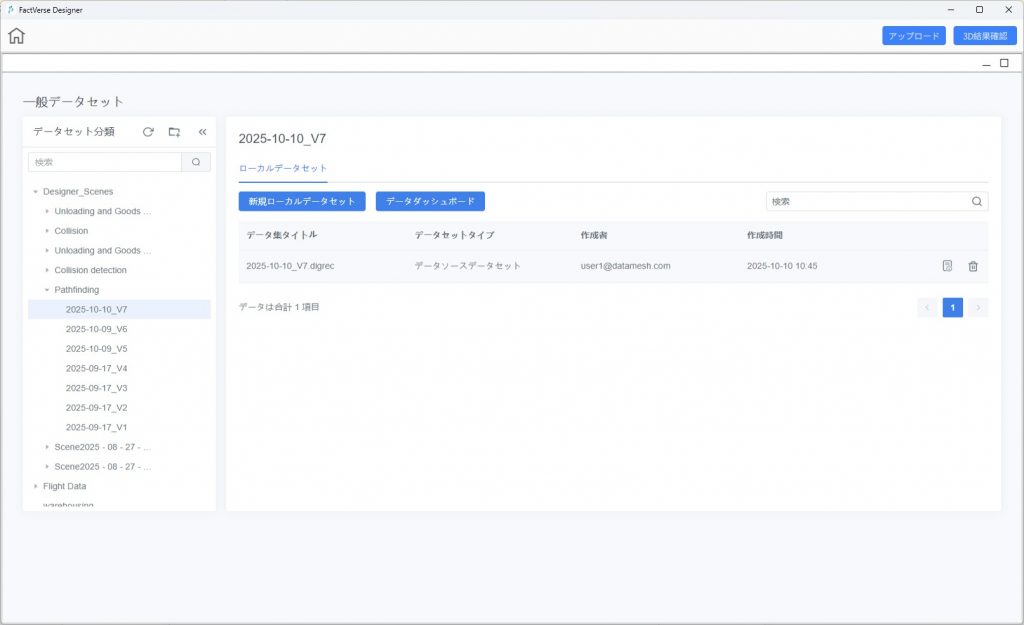
- データダッシュボードが設定済みのシーン:該当データセットのダッシュボードページに直接遷移する。
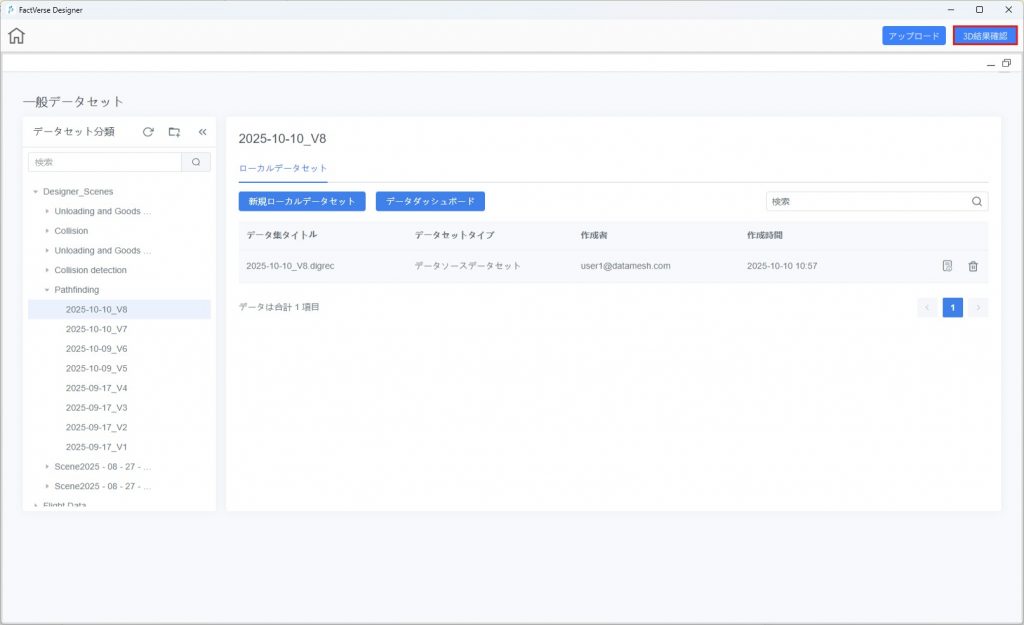
方法2:ホーム画面から入る
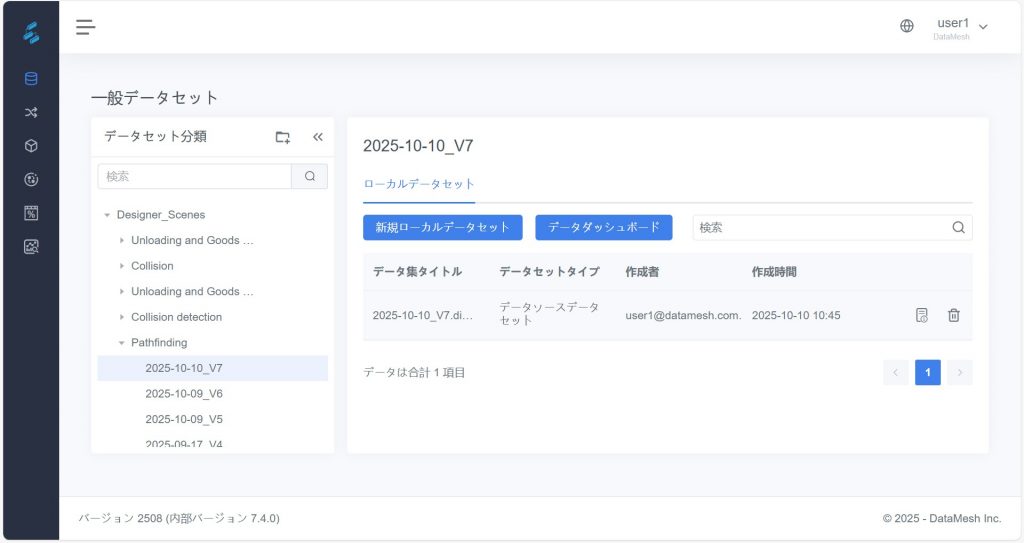
- ホーム画面で【シミュレーションリプレイ】ボタンをクリックし、DFS 共通データセットページを開く。

- 対象データセットを選択すると、シミュレーションリプレイとデータ分析に入ることができ、データチャート分析の閲覧、データダッシュボードの確認、3D シミュレーション記録のリプレイなどの操作を実行できる。
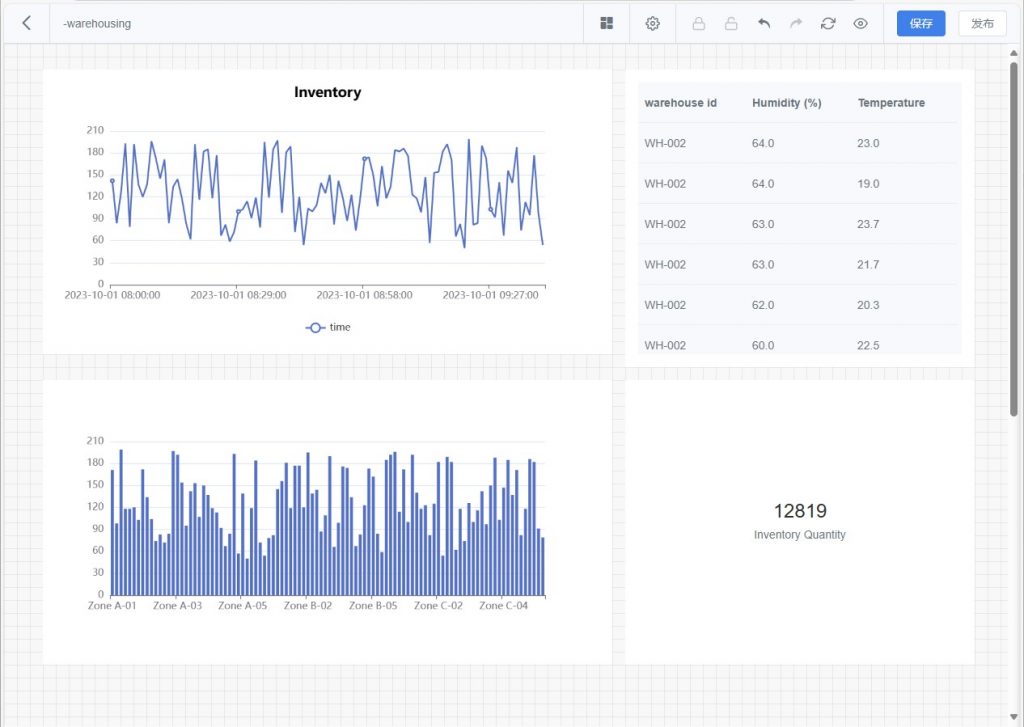
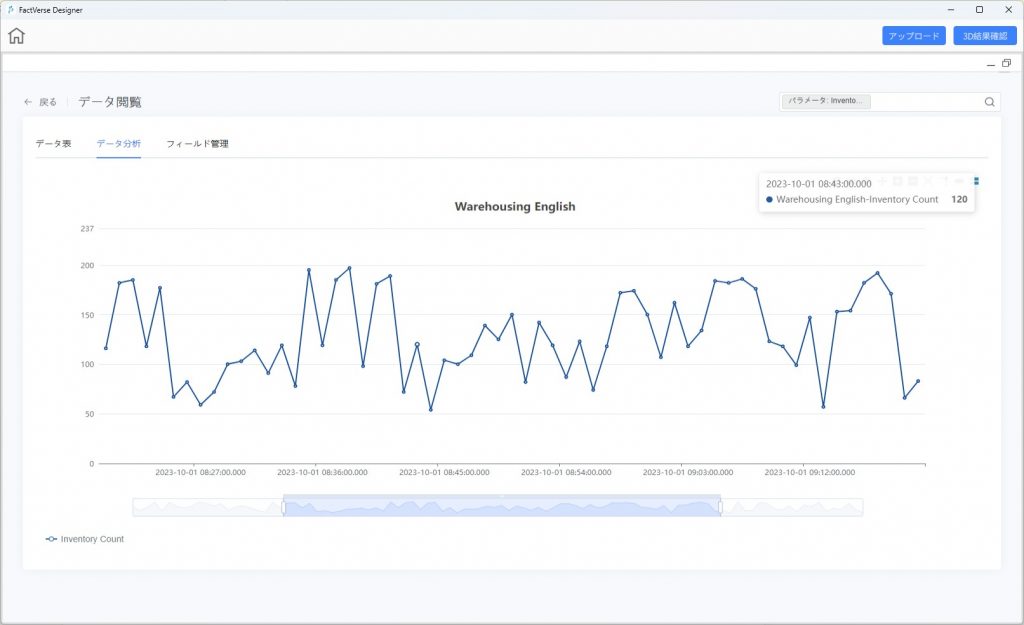
データ分析グラフの確認
グラフを通じてシミュレーション実行状況を直感的に分析し、生産のボトルネックや最適化の機会を把握することができます。
操作手順
- シミュレーションリプレイ画面に入る。
- DFS ウィンドウで以下を実行:
a) 対象データセットをクリックし、そのデータセットのデータ表示ページに入る。
b) 生成されたグラフや分析結果を設定・閲覧する。
詳細な操作方法については『DataMesh FactVerse DFS ユーザーマニュアル』の「データ閲覧」章を参照してください。
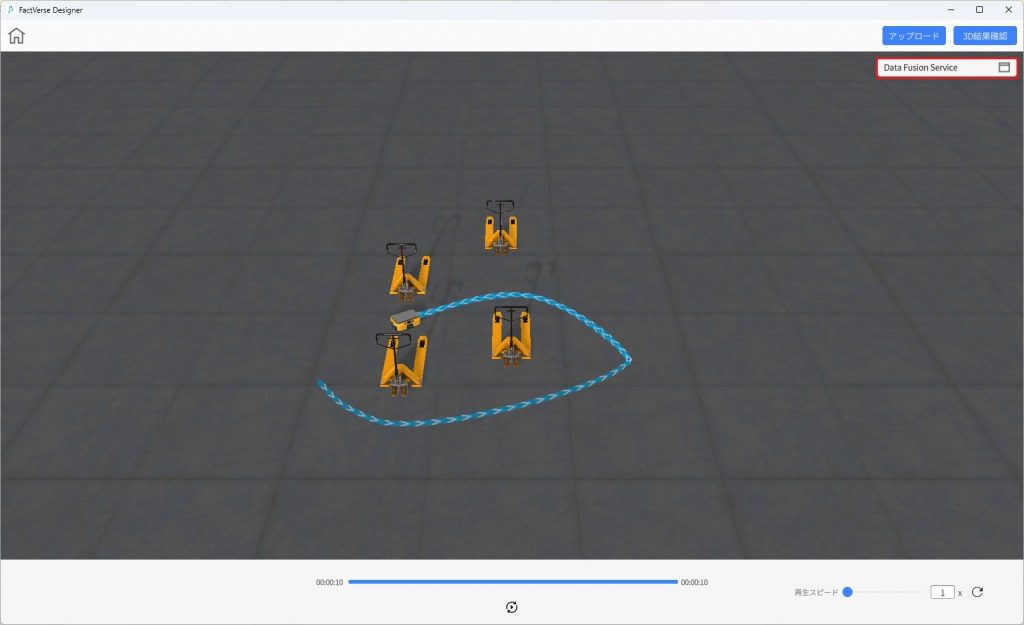
3Dシミュレーション記録の再生
3D シミュレーション記録を再生することで、シミュレーション全過程を再現でき、振り返りや問題調査に役立ちます。
操作手順
- シミュレーションリプレイ画面に入る。
- 【3D結果表示】ボタンをクリックし、対象データセットのシミュレーション記録を読み込み再生する。
- DFS ウィンドウを最小化すると、その下に Designer シーンが表示され、対応するシミュレーション記録の 3D データが読み込まれる。
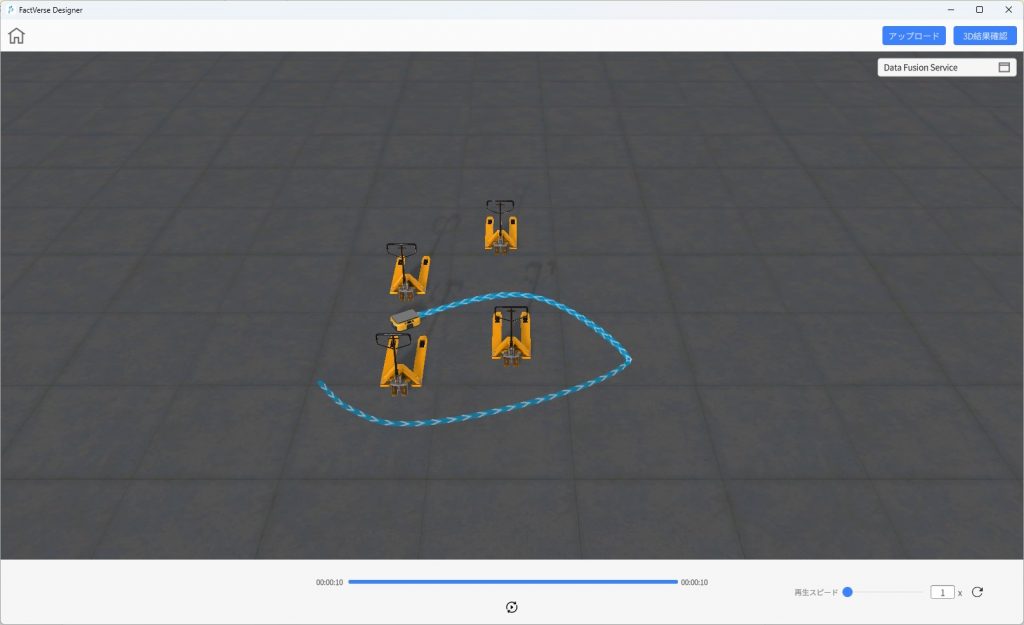
- 以下の再生コントロールボタンを利用できる:
- 再生
 /一時停止
/一時停止
- 再生し直し

- 再生速度:最大 20 倍速まで調整可能。ただし、シークバーでの任意の時間ジャンプには対応していない。
- 【Data Fusion Services】をクリックすると DFS ウィンドウを再び開き、データ分析の継続や別データセットへの切り替えができる。
データダッシュボードの確認
衝突分析表の確認
衝突分析表は、シミュレーション中の全ての衝突イベントを素早く特定でき、問題の再現や設備配置・動線の最適化に役立ちます。
操作手順
- シミュレーションリプレイ画面に入る。
- DFS 内で対象データセットを選択し、データダッシュボードを設定して衝突検出コンポーネントを追加する。(詳細は『DFS ユーザーマニュアル』「ダッシュボードコンポーネントの設定 → 衝突検出」を参照)。
- 衝突分析表を確認する。
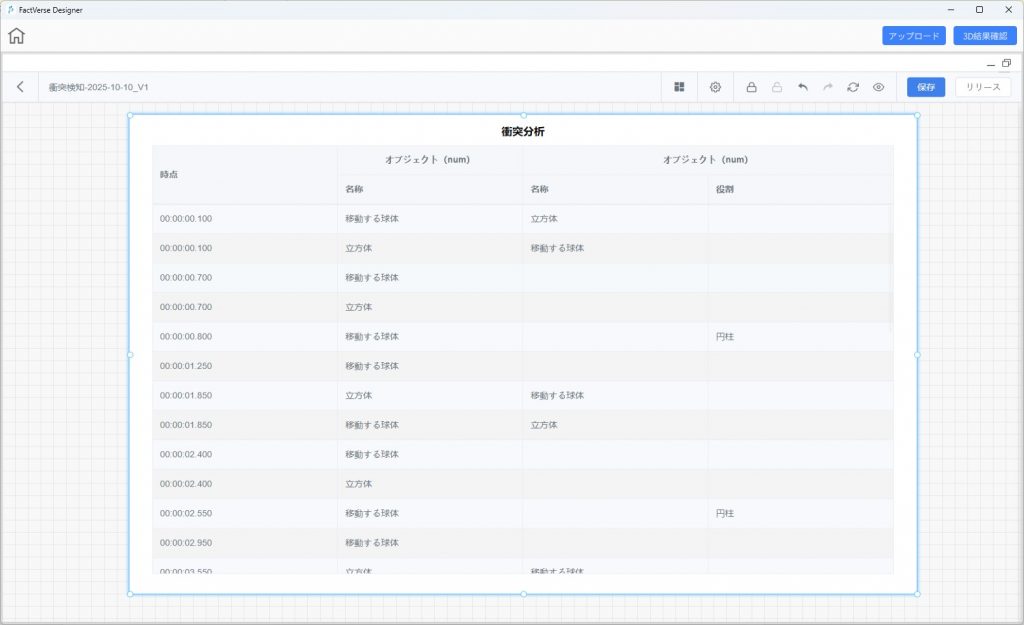
衝突分析表の内容
衝突分析表は、シミュレーション実行中に発生したすべての衝突イベントを記録し、ユーザーが衝突の発生時刻、対象物、および役割を迅速に特定できるようにします。
時間点 | 衝突物体 A 名称 | 衝突物体 B 名称 | 衝突物体 B 役割 |
衝突発生時刻 (DD:HH:MM:SS) | 最初に衝突した孪生体またはモデル名 | 衝突対象の名称 | 衝突相手の役割名 |
シミュレーション実行経路の確認
シミュレーション実行経路を 3D シーン上に表示することで、移動設備の運行軌跡を可視化でき、以下を支援します:
- 経路の合理性と効率性の評価
- 潜在的な改善点の発見
- 衝突や渋滞リスクの予測
- より最適なスケジューリング案の策定
操作手順
- シミュレーションリプレイ画面に入る。
- DFS ウィンドウで対象データセットを選択し、データダッシュボードを設定して経路分析コンポーネントを追加する。(『DFS ユーザーマニュアル』 → 「ダッシュボードコンポーネントの設定 → 経路分析」を参照)。
- 経路分析表で表示したい孪生体の名称にチェックを入れる;
- 【3Dシーン表示】をクリックし、DFS ウィンドウを最小化してシーン上に経路を重ねて表示する。
補足:
- 経路は静的な軌跡として表示される(シミュレーション中の全ての経路点を結んだ線)。
- 複数の経路を同時に表示でき、比較分析に便利。
シーンのデバッグとテスト
FactVerse Designer では デバッグ再生モード を提供しており、シーンロジックの検証、ツインモデルの行為ツリーの実行状況確認、さらにシミュレーションデータ送信やログ出力に対応しています。これにより、開発時のデバッグやフロー最適化を支援します。
デバッグ再生画面
「シーンエディタ」のツールバーにある【デバッグ再生】ボタン![]() をクリックすると、デバッグ再生モード に入ります。
をクリックすると、デバッグ再生モード に入ります。
このモードでは、シーンロジックの実行、行為ツリーのデバッグ、シミュレーションデータ送信、リアルタイムログ確認が可能で、ツインモデルの応答、動作ロジックの正しさ、連動効果を検証できます。
ツールバー機能一覧

ボタン名称 | 機能説明 |
属性パネル | 選択したツインモデルの属性情報を表示。属性値を変更し、データ連動を検証可能。 |
行為ツリープレビュー | 選択したツインモデルの行為ツリーの実行状態を表示し、ブレークポイント設定が可能。 |
シミュレーションデバッグ | シミュレーションデータ入力パネルを開き、手動でデータを送信してツインモデル動作を駆動。 |
ログコンソール | 行為ツリー内の【記録出力】ノードからのデバッグ情報を確認。 |
再生速度 | シーンの実行速度を設定(例:1x、2x)。 |
再生 / 一時停止 | シーン実行を開始・一時停止。 |
ステップ実行 | 行為ツリーのノードを1つずつ実行し、段階的にデバッグ。 |
続行実行 | ブレークポイントで停止後、次のブレークポイントまたは終了まで実行。 |
再実行 | シーン状態をリセットし、最初から実行。 |
再生終了 | デバッグモードを終了し、編集モードに戻る。 |
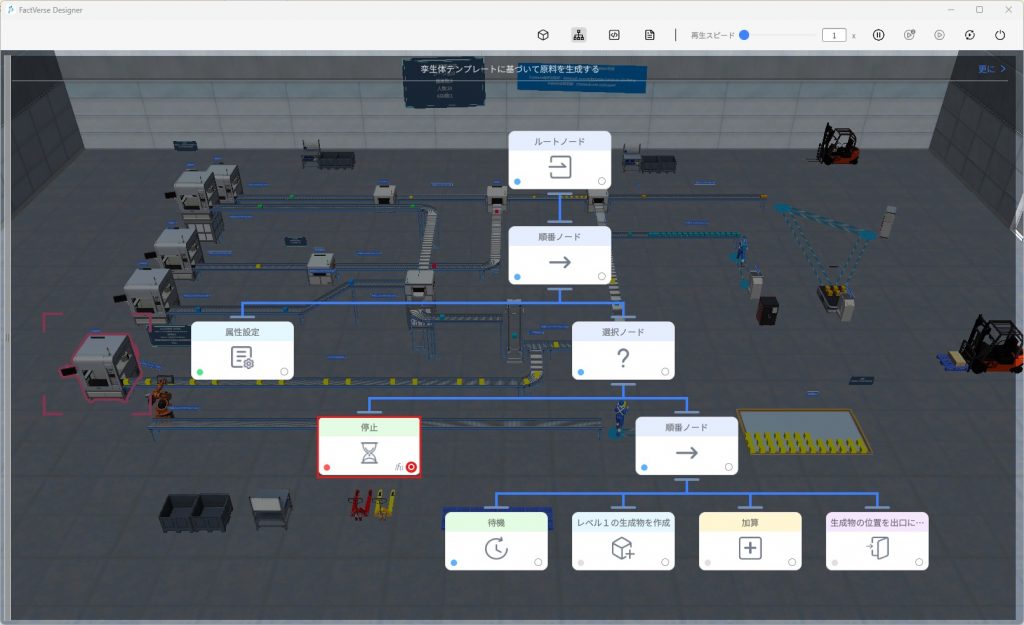
行為ツリーのブレークポイントデバッグ
行為ツリー上にブレークポイントを設定することで、処理を一時停止し、現在の実行状況を確認できます。これにより、ロジックエラーや条件分岐の問題を特定しやすくなります。
操作手順
- デバッグモードに入る:シーンエディタでツールバーの【デバッグ再生】をクリック。
- 行為ツリーパネルを開く:ツインモデルを選択し、【行為ツリープレビュー】
 をクリック。
をクリック。
ノード左下に実行状態が色で表示される:
ノード色 | 説明 |
青 | 実行中のノード |
灰色 | 未実行のノード |
緑 | 実行成功 |
赤 | 実行失敗 |
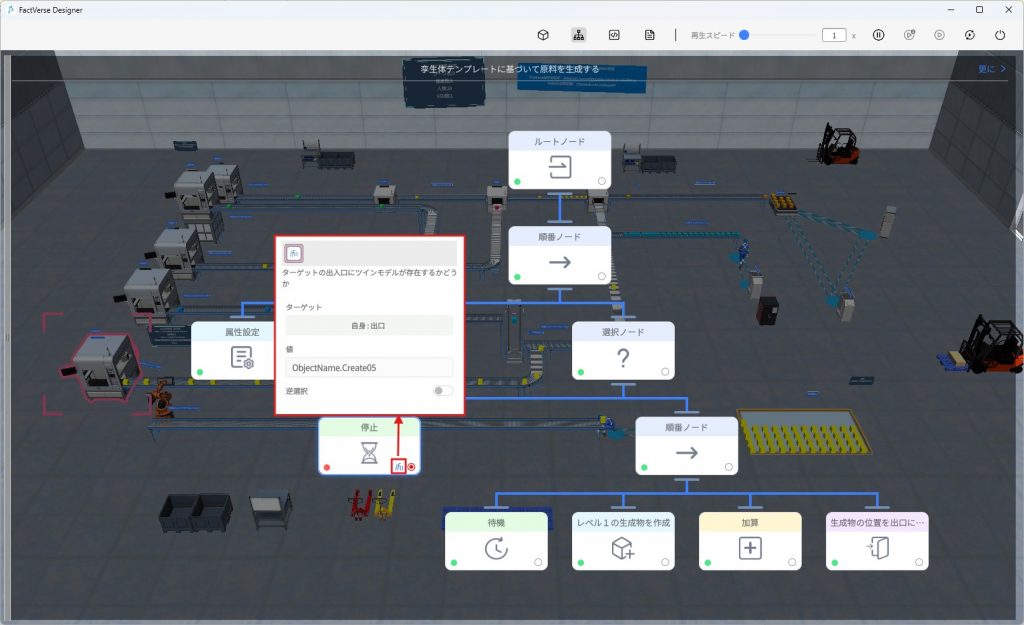
- ブレークポイントを設定:対象ノード右下をクリックして設定。
- 行為ツリーのデバッグ実行
- 行為ツリー実行中、ブレークポイントに到達すると処理が一時停止します。
- ノード右下の【条件】ボタン
 をクリックすると条件パネルが開き、判定ロジックの結果を確認できます(緑=判定成立、赤=判定不成立)
をクリックすると条件パネルが開き、判定ロジックの結果を確認できます(緑=判定成立、赤=判定不成立)
- 実行フロー制御:ツールバーの【ステップ再生】または【続行再生】を使用して、行為ツリーの実行を制御できます。
- デバッグモード終了:ツールバーの【終了】ボタン
 をクリックしてデバッグ実行を終了し、シーン編集画面に戻ります
をクリックしてデバッグ実行を終了し、シーン編集画面に戻ります - 問題ノードの修正:シーン内で該当ツインモデルを選択し、行為ツリーを開いて問題のあるノードを修正し、再度デバッグ検証を行います。
シミュレーションデータデバッグ
デバッグ再生モードでは、ツインモデルの属性値を直接変更し、実際の運用中におけるデータ変化が行為ツリーやシーンに与える影響をシミュレーションできます。
シーンの挙動や行為ツリーの反応が期待通りかを確認します。
この機能は、単一の属性変化がツインモデルの動作に与える影響を検証する際に有効です。
ログ出力と問題の特定
行為ツリー内で【記録生成】ノードを使用すると、デバッグモードの「ログコンソール」に出力内容がリアルタイムで表示されます。これにより、開発者は変数の状態を把握し、イベントの経過を記録できます。
![]()
典型的な用途:
- 属性値の変化を出力する
- 実行経路を記録する