ガイドブック
デジタルツインシーンの素早い構築
本章では、FactVerse リソースパッケージに含まれるテンプレートやモデルを用いて、FactVerse Designer でデジタルツインシーンを構築する基本的なフローを紹介します。
基本フロー
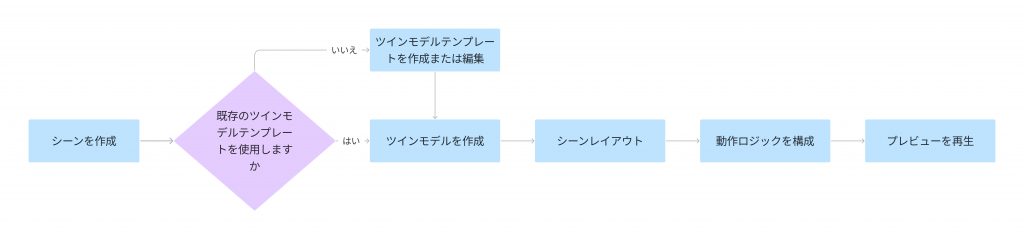
1. ツインモデルテンプレートの作成:
- バーチャルファクトリー DLC に含まれるプリセットテンプレートを使用する場合、この手順は省略可能。
- カスタムツインモデルテンプレートを作成する場合は、「ツインモデルテンプレートの作成」に関する章を参照。
2. ツインモデルの作成:ツインモデルテンプレートを基に、必要なツインモデルを作成。
- 選択したツインモデルテンプレートに基づき、手動でツインモデルを作成することも、大規模な生産環境に対応するために複数のツインモデルを一括作成することも可能です。
3. シーンレイアウトと接続関係の設定:
- レイアウト計画:ツインモデルの位置や配置を調整し、シーン内での協調動作を実現します。
- 接続設定:ツインモデル間の接続関係を設定し、製品または物流の流れをシミュレートします。
4. 動作ロジックの設定:
- 属性設定:ツインモデルの属性を構成し、実際の工場での挙動を正しく再現できるようにします。
- 経路計画:ツインモデルの移動経路を設定し、予定されたルートに従って動作・搬送を行えるようにします。
- 行為ツリー編集:行為ツリーエディターを用いて、ツインモデルのインタラクションやアクションを定義します。
5. シーンの再生と確認:
- 実行と確認:FactVerse Designer 内で設定済みのデジタルツインシーンを実行し、全体的な動作を確認します。
- 動作デバッグ:一時停止やステップ実行などを用いて、ツインモデル間のインタラクションロジック、経路動作、状態変化を検証し、潜在的な問題を特定・解決します。
- シミュレーション効果の検証:属性値の変化、色の変化、アクションのトリガーなどのフィードバックをもとに、シミュレーションが設計意図どおりかを検証します。
バーチャルファクトリーリソースパッケージを用いたツインモデルの作成
本節では、バーチャルファクトリーリソースパッケージに含まれるテンプレートを用いて、以下の代表的なツインモデルを迅速に作成する方法を紹介します。
- 重荷重用平型コンベヤー
- 原料生成機
- AGV(無人搬送車)
- 一時保管エリア
操作手順
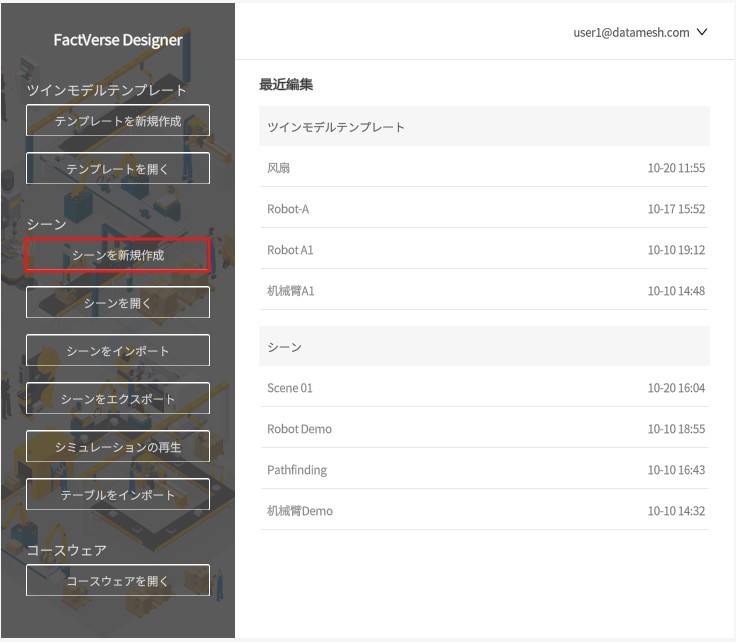
1. 新規シーンの作成:FactVerse Designer のホーム画面で【新規シーン】をクリックし、シーンエディターで新しいシーンを開きます。
2.重荷重用平型コンベヤーの作成:
a) デジタルツインライブラリ > ツインモデルテンプレートで、/Public Directory/FactVerseリソースパッケージ/ を展開し、「重載平型帯」テンプレートをクリックします。
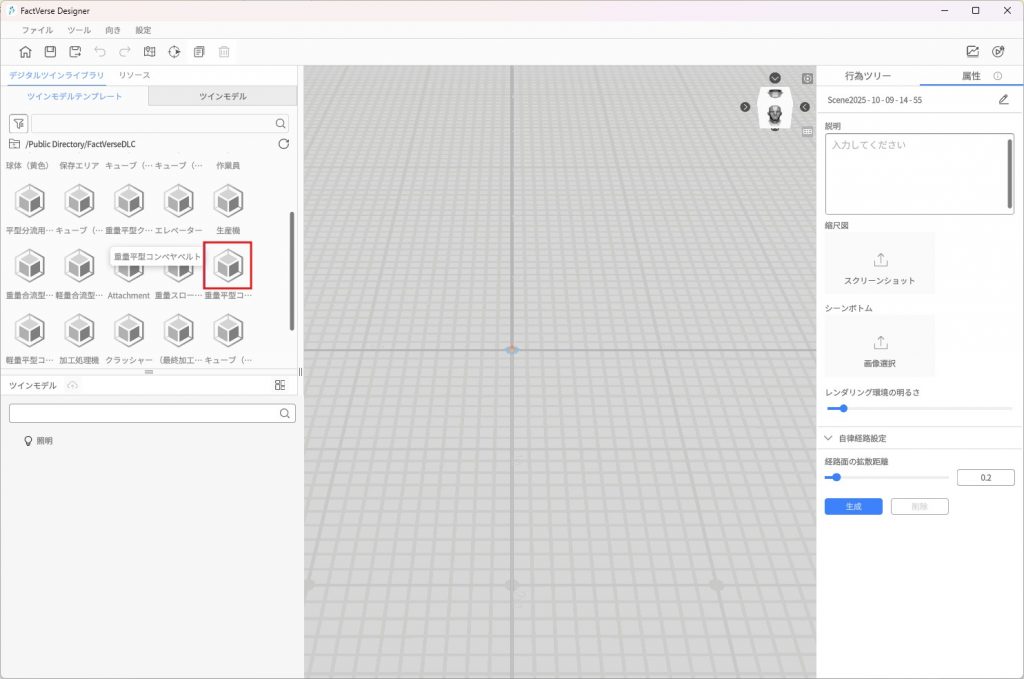
b) シーン内の配置場所をクリックし、ツインモデルを作成・配置します。
c) 配置完了後、右クリックで配置モードを終了します。
3. 原料生成機の作成:
a) デジタルツインライブラリ > ツインモデルテンプレートで、/Public Directory/FactVerseリソースパッケージ/原料生成機 をクリックします。
b) シーン内の配置場所をクリックし、原料生成機を配置します。
c) 配置完了後、右クリックで配置モードを終了します。
4. 一時保管エリアの作成:
a) デジタルツインライブラリ > ツインモデルテンプレートで、/Public Directory/FactVerseリソースパッケージ/一時保管エリア をクリックします。
b) シーン内の配置場所をクリックし、一時保管エリアを配置します。
c) 配置完了後、右クリックで配置モードを終了します。
5. AGV(無人搬送車)の作成:
a) デジタルツインライブラリ > ツインモデルテンプレートで、/Public Directory/FactVerseリソースパッケージ/AGV をクリックします。
b) シーン内の配置場所をクリックし、AGV を配置します。
c) 配置完了後、右クリックで配置モードを終了します。
6.シーンの保存:ツールバーの【保存】ボタン![]() をクリックし、シーンを保存します。シーン名は「簡易シーンデモ」とします。
をクリックし、シーンを保存します。シーン名は「簡易シーンデモ」とします。
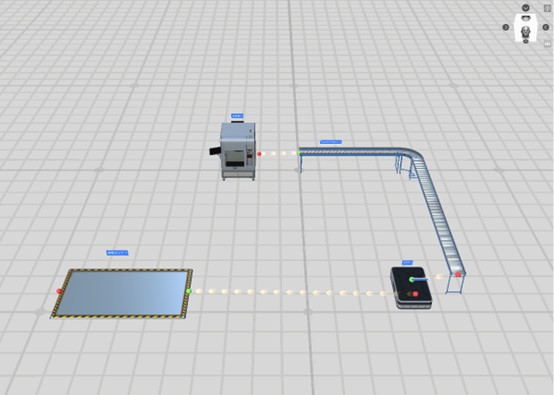
シーンレイアウトと接続関係の設定
本節では、シーン内でツインモデルを適切にレイアウトし、接続関係を設定することで生産プロセスをシミュレートする方法を示します。また、デバッグを通じて各ツインモデルの実行ロジックを確認し、プロセス全体が正しくかつスムーズに動作するようにします。
レイアウト計画
実際の生産プロセスに基づき、ツインモデルの位置やサイズを調整し、シーン内で業務ロジックを正確に反映させます。
コンベヤーの長さと高さの調整
コンベヤーの編集ツールを使用して、コンベヤーの長さや高さを調整し、シミュレーションの要件に適合させることができます。以下の手順で調整を行ってください。
1. シーンエリアでコンベヤーを選択し、【編集】ボタンをクリックしてコンベヤーの編集モードに入ります。
2. 編集モードでは、コンベヤーの編集ツール を使用して、コンベヤーの長さを伸縮させたり、高さを調整したりできます。
a) コンベヤーの長さを伸ばす:編集モードで、コンベヤー編集ツール の長さ調整ライン(赤色)の端点をクリックし、マウスの左ボタンを押しながらドラッグして、コンベヤーの長さを調整します。
b) コンベヤーの高さを調整:編集モードで、コンベヤー編集ツール の高さ調整ライン(緑色)の端点をクリックし、マウスの左ボタンを押しながら上下に移動して、コンベヤーの高さを調整します。
3. 調整が完了したら、【編集終了】ボタンをクリックし、コンベヤーの編集モードを終了します。
4. ツールバーの【保存】ボタン![]() をクリックし、シーンを保存します。
をクリックし、シーンを保存します。
コンベヤーに新しいノードを追加する
コンベヤーノード を追加する手順は以下のとおりです:
- 「コンベアベルト1」 をクリックして選択し、【編集】ボタンをクリックします。
- シーンエリア の空白部分でマウスをダブルクリック し、コンベヤーにノードを追加 します。ノードを削除する場合は、【ノードを削除】オプションをクリックすると、コンベヤーの末端部分 が削除されます。
- ノードの追加が完了したら、【編集終了】ボタンをクリックします。
- ツールバー の【保存】ボタン
 をクリックし、シーンを保存 します。
をクリックし、シーンを保存 します。
接続関係の設定
仮想工場のシーン では、生産ライン上の貨物がツインモデル間で輸送される ようにするために、ツインモデルの入出力ポイント を接続する必要があります。
このセクションでは、以下の入出力ポイントを接続します:
- 「原料生成機」出口(
 ) → 「コンベヤー」入口(
) → 「コンベヤー」入口( )
) - 「コンベヤー」出口() →「AGV」入口()
- 「AGV」出口() → 「一時保管エリア」入口()
注意:同じツインモデル内の出口と入口を接続する必要はありません。
入出力ポイントを接続する手順:
- シーン上で「原料生成機」の出口()をクリックし、【接続】ボタンをクリック します。
- 「コンベヤー」の入口()にマウスを移動し、左クリック すると、「原料生成機」の出口()と「コンベヤー」の入口()の接続が完了します。
- 同様の手順で、以下の入出力ポイントをそれぞれ接続します:
- 「コンベヤー」出口() →「AGV」入口()
- 「AGV」出口() → 「一時保管エリア」入口()
- ツールバーの【保存】ボタンをクリックし、シーンを保存します。
実行ロジックの設定
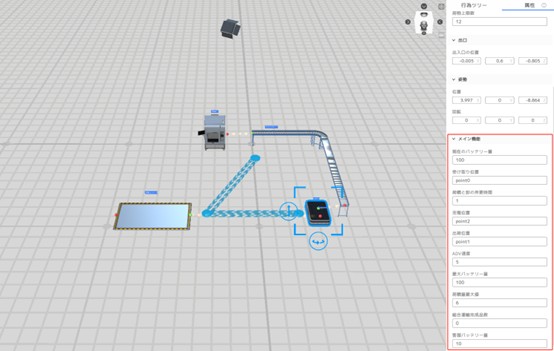
「生産機」の主機能を設定する
このセクションでは、「原料生成機」の主機能を設定 し、仮想工場のシーンでシミュレーション生産 を実行できるようにします。:
- シーンエリアで「生産機」を選択 します。
- プロパティパネルの「属性」タブで、「メイン機能」オプションを見つけます。
- 「ツインモデル生成に使用するテンプレート識別子」オプションの横にある編集ボタンをクリックします。
- 開いたテンプレートリストから、リソースパッケージ内の「産物タイプのテンプレート」を選択します。
- これにより、「生産機」は選択したテンプレートに基づいて製品を生産 します。
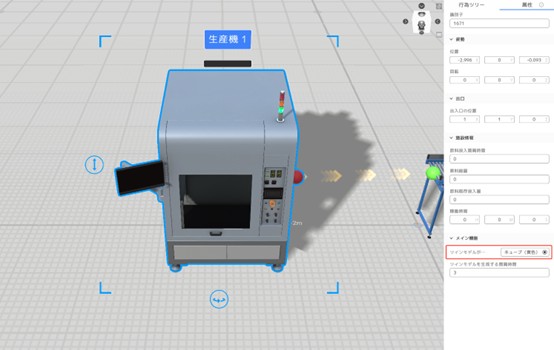
- 「生産機」の「ツインモデル生成間隔時間」(生産機が製品を生成する時間間隔)を変更 します。適切な数値を設定し、実際の工場の生産ペースをシミュレーションします。
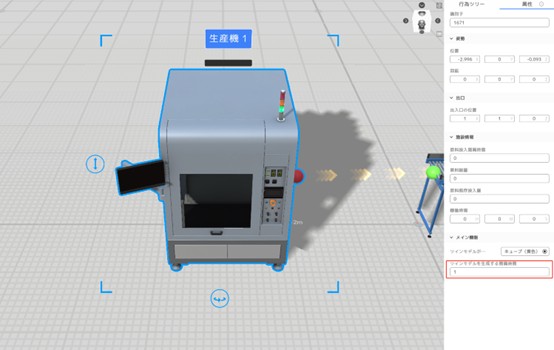
- ツールバーの【保存】ボタン をクリックし、シーンを保存します。
「コンベヤー」の速度を変更する
このセクションでは、コンベアの速度を「5m/s」に調整 し、シミュレーション内でより高速な搬送を実現します。
- シーンエリアで「コンベヤー」を選択 します
- 属性パネルで「コンベヤー速度」の値を「5」に変更 します。
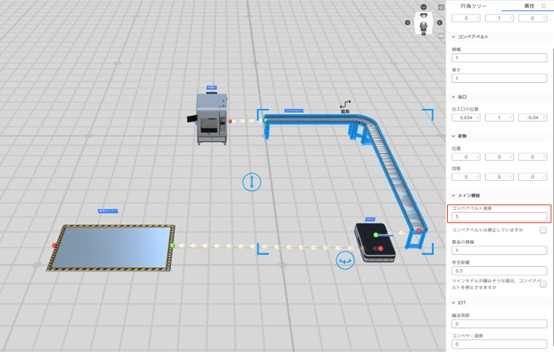
- ツールバーの「保存」ボタン をクリックし、シーンを保存します。
「AGV」の走行経路を作成する
AGV(無人搬送車)「AGV」に走行経路を設定することで、指定されたルートに沿って移動 できるようにします。以下の手順に従って設定を行います:
- ツールバーの「経路モード」ボタン
 をクリックし、経路モード画面を開きます。
をクリックし、経路モード画面を開きます。 - ツールバーの「経路モード」ボタン
 をクリックし、構築モードに切り替えます。
をクリックし、構築モードに切り替えます。 - シーンエリアの異なる3か所をクリックし、AGVの走行経路に3つの経路点を作成 します:
- point0:受け取り位置
- point1:出荷位置
- point2:充電位置
- ツールバーの「選択」ボタン
 をクリックし、選択モードに切り替え ます。
をクリックし、選択モードに切り替え ます。 - point0 と point1 の間の接続線を選択し、双方向(↔)に設定 します。
- point1 と point2 の間の接続線を選択し、双方向(↔)に設定 します。
- 「<」ボタンをクリックして経路モード画面を終了 し、シーンエディター画面に戻ると経路を保存するかの確認メッセージが表示 されます。
- 「はい」ボタンをクリックして経路を保存 します。
- ツールバーの「保存」ボタンをクリックし、シーンを保存 します。
「AGV」の主機能を設定する
「AGV」の主機能を設定 することで、指定された経路とパラメータに基づいて移動とタスクを実行 できるようにします。
設定手順:
- シーンエリアで「AGV」を選択 します。
- 「AGV」の移動経路ポイントを設定 します。
- 「受け取り位置」:前に設定した経路ポイント名(例:point0)。
- 「出荷位置」:前に設定した経路ポイント名(例:point1)。
- 「充電位置」:前に設定した経路ポイント名(例:point2)。
- 「AGV速度」を「5」に設定 します。
- 「荷積量最大値」を「6」に設定(最大で6個の貨物を積載可能)。
- 「荷積と卸の所要時間」を「1」に設定(貨物の積み降ろしに1秒 必要)。
- ツールバーの「保存」ボタンをクリックし、シーンを保存 します。
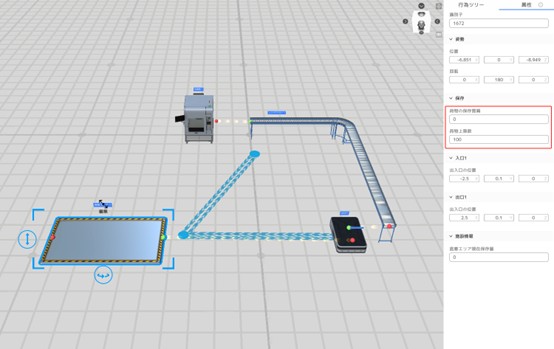
一時保管エリアの設定
一時保管エリアは貨物を保管するためのスペースであり、保管容量や配置ルールを設定することで管理可能です。
設定項目:
- 荷物上限数:一時保管エリアに保管可能な貨物の最大数量を設定します。
- 荷物の保存間隔:各保管ユニット間の間隔を定義します。
- 一時保管エリアは、テンプレートで設定された貨物の幅と長さに基づいて自動的に保管ユニットを分割します。
- 各保管ユニットには最大1つの貨物を収納可能です。
シーンのプレビュー再生
シーンをプレビューし、シミュレーション結果を確認しながら再生設定を調整 できます。
シーンのプレビュー手順:
- ツールバーの 再生ボタン
 をクリックし、シーンのプレビューを開始します。シーンの動作やレイアウトが期待通りになっているか確認します。
をクリックし、シーンのプレビューを開始します。シーンの動作やレイアウトが期待通りになっているか確認します。 - 再生中に進行バーを使用し、再生速度を調整可能 です。必要に応じて一時停止ボタン をクリックし、シミュレーションを一時停止できます。
- 停止ボタン
 をクリックすると、再生モードを終了し、編集モードに戻ります。
をクリックすると、再生モードを終了し、編集モードに戻ります。